从自适应机器人行业现状来看,需求端与供给端均展现出积极且加速的增长态势。劳动力供需矛盾日益激化,自动化转型迫在眉睫。机器人本体所具备的能力可被划分为“运动能力”和“操作能力”两类,现有机器人在运动能力方面的发展较为成熟,但其操作能力仍然刚性且通用性不足,难以应对复杂多变的作业场景。在这一背景下,当前实现通用机器人的关键是提高操作能力。自适应机器人凭借高级别的位姿偏差补偿、抗干扰和任务泛化能力,成为通用机器人在物理世界的执行基座。

制造业的劳动力供需矛盾日益激化,自动化转型迫在眉睫。
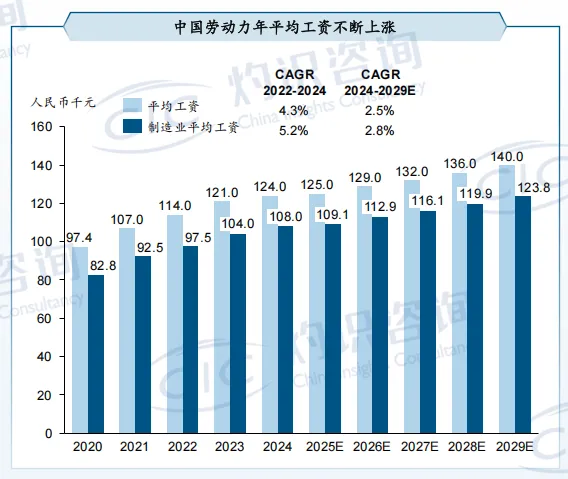
随着人口结构变化与劳动力流动趋势转变,劳动力供给总量呈现持续下降态势, 部分行业已出现人力储备不足的结构性矛盾。
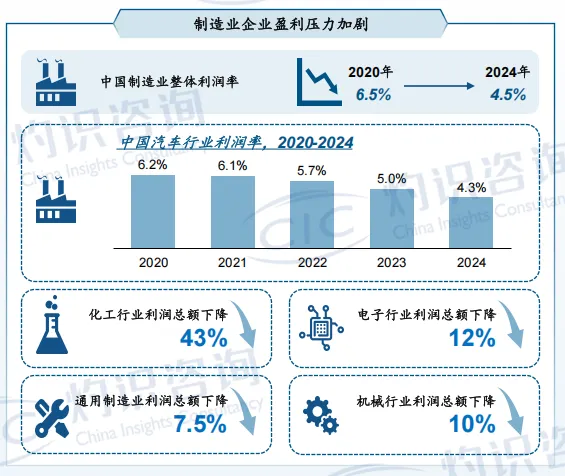
受用工需求紧张、社会保障成本上升及技能人才稀缺等因素影响,企业劳动力雇佣成本不断增加,对利润空间形成明显挤压。
高温、高湿、高噪、高危及高重复性等劳动岗位对新一代劳动者吸引力较低, 使得“有岗无人”的结构性劳动力短缺问题更为突出。
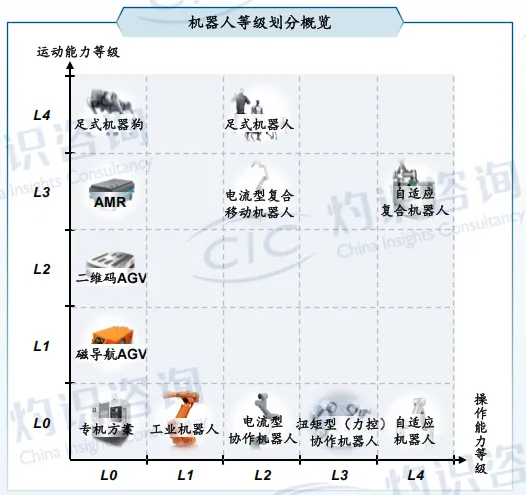
根据 “运动能力”及“操作能力”,现有机器人方案可被划分为L0至L4共五个等级。
机器人本体所具备的能力可被划分为“运动能力”和“操作能力”两类。
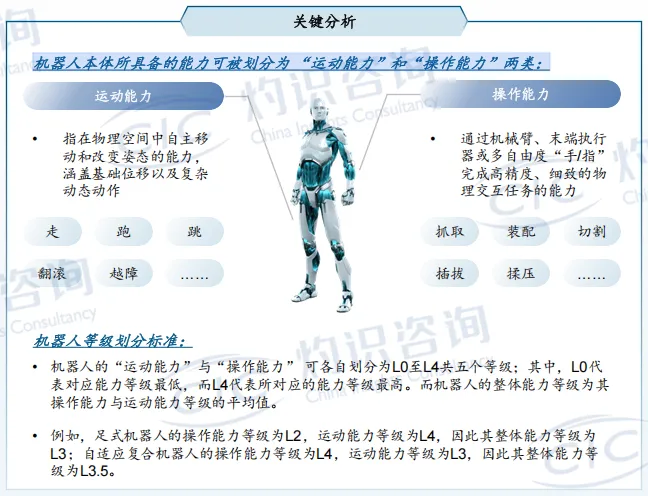

当前机器人在运动能力方面的发展较为成熟,多个细分场景中的表现已接近甚至达到人类的运动水平。

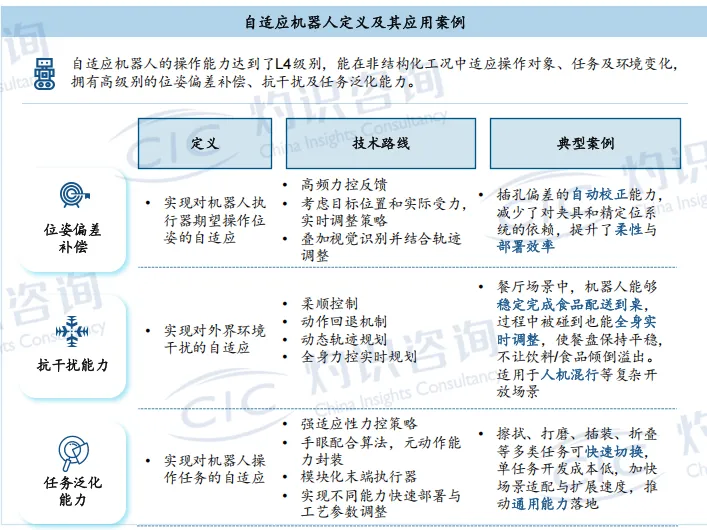
自适应机器人具备高级别的位姿偏差补偿、抗干扰及任务泛化能力,是通用智能在物理世界的执行基座。
参数泛化性差
抗干扰能力差
感知定位精度困境
任务泛化能力差

环境扰动实时补偿
任务泛化
非标对象作业