еЕ≥йФЃиѓНпЉЪдЇЇеЈ•жЩЇиГљпЉМж≥ЫеМЦиГљеКЫпЉМйЪРз©ЇйЧіеК®еКЫе≠¶пЉМз•ЮзїПеЄЄеЊЃеИЖжЦєз®Л
Metalearning Generalizable Dynamics from Trajectorieshttps://journals.aps.org/prl/abstract/10.1103/PhysRevLett.131.067301
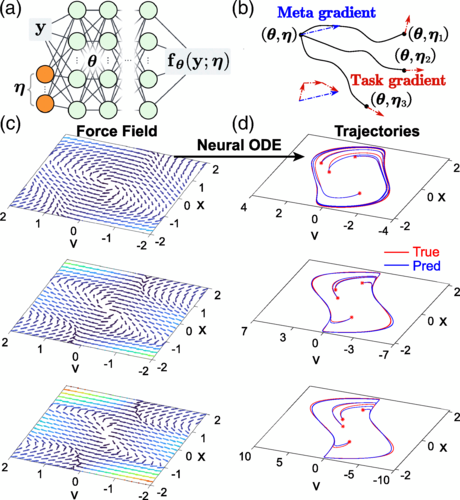
еГПиЃЄе§ЪиБМдЄЪдЄАж†ЈпЉМзЙ©зРЖе≠¶еЃґж≠£еЬ®е∞ЭиѓХеИ©зФ®дЇЇеЈ•жЩЇиГљпЉИAIпЉЙжЭ•иЊЕеК©еЈ•дљЬвАФвАФеЄМжЬЫдЄНдЉЪ襀 AI еПЦдї£гАВеЬ®ињЩдЄ™жЦєеРСдЄКпЉМз†Фз©ґдЇЇеСШеЉАеПСеЗЇдЄАзІН AI зЃЧж≥ХпЉМеПѓдї•еИЖжЮРдЄАзїДзЙ©дљУзЪДињРеК®пЉМе¶ВжСЖеК®зЪДйТЯжСЖжИЦеЉєиЈ≥зЪДеЉєз∞ІзО©еЕЈпЉМзДґеРОеИ©зФ®ињЩдЇЫдњ°жБѓжЭ•еїЇзЂЛйАЪзФ®ж®°еЮЛпЉМеИЖжЮРињЩдЇЫз≥їзїЯдЄКзЪДдљЬзФ®еКЫгАВињЩзІНжЦєж≥ХеПѓдї•жО®еєњеИ∞ж≠§еЙНжЬ™зїПз†Фз©ґзЪДзЙ©дљУпЉМйАЯеЇ¶жѓФеЕґдїЦдЄНиѓХеЫЊж≥ЫеМЦзЪД AI жЦєж≥ХењЂ100еАНгАВзЙ©зРЖе≠¶еЃґдєЛеЙНеЈ≤зїПи°®жШОпЉМAI зЃЧж≥ХеПѓдї•иЗ™еК®еПСзО∞е§НжЭВжХ∞жНЃдЄ≠зЪДйЪРиЧПеЕ≥з≥їгАВзДґиАМпЉМеѓєињЩдЇЫзЃЧж≥ХзЪДдЄАдЄ™еЄЄиІБжЙєиѓДжШѓеЃГ俐姙ињЗеЕЈдљУпЉМеП™йТИеѓєдЄАзІНзЙєеЃЪз≥їзїЯгАВињЩй°єжЬАжЦ∞з†Фз©ґжПРеЗЇдЄАзІНеПѓиІ£йЗКзЪДеЕГз•ЮзїПеЄЄеЊЃеИЖжЦєз®ЛпЉИinterpretable meta neural ordinary differential equationпЉМiMODEпЉЙжЦєж≥ХпЉМзФ®дЇОдїОе§ЪдЄ™еЕЈжЬЙдЄНеРМзЙ©зРЖеПВжХ∞зЪДеК®еКЫз≥їзїЯзЪДиљ®ињєдЄ≠ењЂйАЯе≠¶дє†пЉИйЭЮеПВжХ∞зЙєеЃЪзЪДпЉЙйАЪзФ®еК®еКЫе≠¶гАВеЕЈдљУиАМи®АпЉМиѓ•жЦєж≥ХйЗЗзФ®дЄАзІНеПМе±ВдЉШеМЦж°ЖжЮґвАФвАФе§Це±ВжНХжНЙз†Фз©ґзЪДеК®еКЫз≥їзїЯеЃЮдЊЛзЪДеЕ±еРМеКЫеܯ嚥еЉПпЉМеЖЕе±ВйАВеЇФдЄ™дљУз≥їзїЯеЃЮдЊЛвАФвАФжЭ•е≠¶дє†еЕГзЯ•иѓЖпЉМеН≥еК®еКЫз≥їзїЯеЃЮдЊЛзЪДеКЫеЬЇж≥ЫеЗљеПШеМЦпЉМиАМжЧ†йЬАзЯ•йБУзЙ©зРЖеПВжХ∞гАВеЕИй™МзЙ©зРЖзЯ•иѓЖпЉМдЊЛе¶ВдњЭеЃИеКЫеЬЇеТМжђІеЗ†йЗМеЊЈеѓєзІ∞жАІпЉМеПѓдї•дљЬдЄЇељТзЇ≥еБПеЈЃжЦєдЊњеЬ∞еµМеЕ•з•ЮзїПзљСзїЬжЮґжЮДдЄ≠гАВеАЯеК©е≠¶дє†еИ∞зЪДеЕГзЯ•иѓЖпЉМиѓ•жЦєж≥ХеПѓдї•еЬ®еЗ†зІТеЖЕеѓєжЬ™зЯ•з≥їзїЯеїЇж®°пЉМеєґдЄФеПѓдї•еПНеРСжП≠з§ЇеЕ≥дЇОз≥їзїЯзЙ©зРЖеПВжХ∞зЪДзЯ•иѓЖпЉМеИ©зФ®иІВеѓЯиљ®ињєжЭ•вАЬжµЛйЗПвАЭжЬ™зЯ•з≥їзїЯзЪДзЙ©зРЖеПВжХ∞гАВеЬ®еЕґдЄ≠дЄАдЄ™дЊЛе≠РдЄ≠пЉМз†Фз©ґдЇЇеСШеРСзЃЧж≥ХжПРдЊЫдЄАзїДиљ®ињєпЉМе¶ВдЄЛиРљзЪДеЉєз∞ІзО©еЕЈзЪДдљНзљЃеТМйАЯеЇ¶пЉМжѓПдЄ™еЉєз∞ІзО©еЕЈеИЪеЇ¶дЄНеРМгАВиѓ•зЃЧж≥ХеИЖжЮРдЇЖињЩдЇЫиљ®ињєпЉМзДґеРОжЮДеїЇдЇЖдЄАдЄ™еЕЈжЬЙеПѓи∞ГеПВжХ∞зЪДйАЪзФ®ж®°еЮЛпЉМдљњеЕґиГље§ЯеЬ®зЇ¶дЄАеИЖйТЯжЧґйЧіеЖЕеИЖжЮРдїїдљХеЉєз∞ІзО©еЕЈзЪДињРеК®пЉМеН≥дљњжШѓдЄНеЬ®еЕґиЃ≠зїГйЫЖдЄ≠зЪДеЉєз∞ІзО©еЕЈгАВеѓєдЇОжЫізЃАеНХзЪДз≥їзїЯпЉМе¶ВеНХжСЖеТМжМѓиН°зФµиЈѓпЉМеИЖжЮРеПѓиГљеП™йЬАеЗ†зІТйТЯгАВз†Фз©ґеЫҐйШЯйҐДиЃ°пЉМињЩзІНжЦєж≥ХеПѓдї•еЇФзФ®дЇОдЄНеРМдїЛиі®дЄ≠зФЯзЙ©зїЖиГЮзЪДжЬЇжҐ∞еИЖжЮРпЉМжИЦиАЕзФ®дЇОеЬ®ењЂйАЯеПШеМЦзЪДзОѓеҐГдЄ≠жОІеИґжЬЇеЩ®дЇЇгАВеЫЊ1. ж†єжНЃдЉ∞иЃ°еКЫеЬЇйҐДжµЛз≥їзїЯзЪДиљ®ињєгАВжЬђжЦЗзЉЦиѓСиЗ™пЉЪhttps://physics.aps.org/articles/v16/s119
е§Іж®°еЮЛдЄОзФЯеСљеМїе≠¶пЉЪ
AI + ScienceзђђдЇМе≠£иѓїдє¶дЉЪеРѓеК®
иѓ¶жГЕиѓЈиІБпЉЪ
е§Іж®°еЮЛдЄОзФЯзЙ©еМїе≠¶пЉЪAI + ScienceзђђдЇМе≠£иѓїдє¶дЉЪеРѓеК®
жО®иНРйШЕиѓї
зВєеЗївАЬйШЕиѓїеОЯжЦЗвАЭпЉМжК•еРНиѓїдє¶дЉЪ