



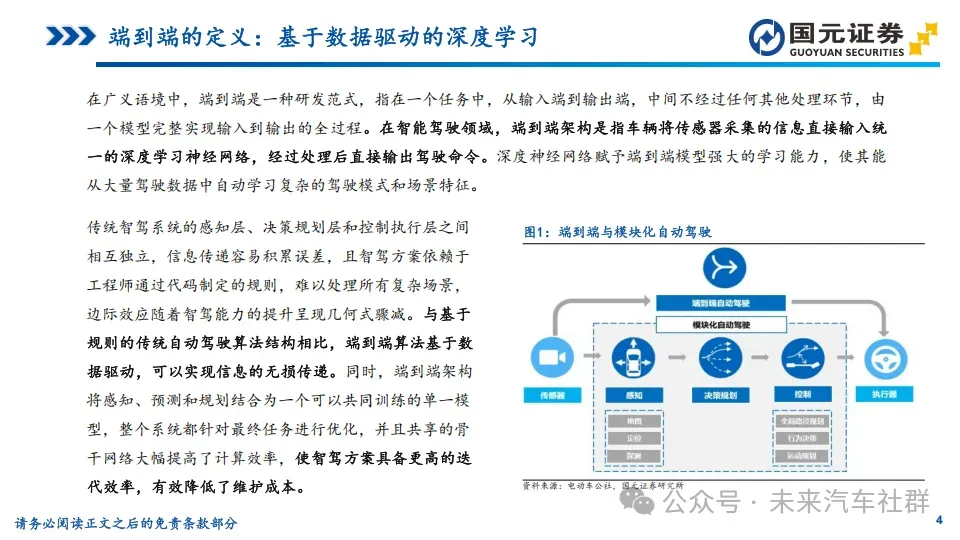
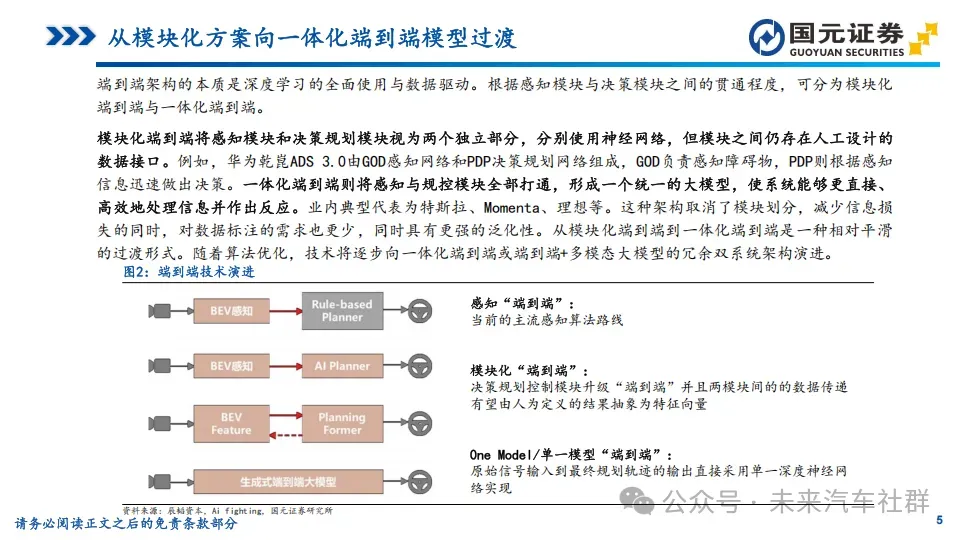
在广义语境中,端到端是一种研发范式,指在一个任务中,从输入端到输出端,中间不经过任何其他处理环节,由一个模型完整实现输入到输出的全过程。在智能驾驶领域,端到端架构是指车辆将传感器采集的信息直接输入统一的深度学习神经网络,经过处理后直接输出驾驶命令。深度神经网络赋予端到端模型强大的学习能力,使其能从大量驾驶数据中自动学习复杂的驾驶模式和场景特征。
传统智驾系统的感知层、决策规划层和控制执行层之间 相互独立,信息传递容易积累误差,且智驾方案依赖于 工程师通过代码制定的规则,难以处理所有复杂场景,边际效应随着智驾能力的提升呈现几何式骤减。与基于规则的传统自动驾驶算法结构相比,端到端算法基于数据驱动,可以实现信息的无损传递。同时,端到端架构将感知、预测和规划结合为一个可以共同训练的单一模型,整个系统都针对最终任务进行优化,并且共享的骨干网络大幅提高了计算效率,使智驾方案具备更高的迭代效率,有效降低了维护成本。
以下为报告节选:

本报告共计:95页。受篇幅限制,仅列举部分内容。
绿色通道,报告一键下载!
需要批量下载和及时更新最新汽车行业分析报告的朋友,可以加入我们的《未来汽车社群》知识星球,大量的中外文精品汽车行业分析报告及各类专题资料将会优先分享到未来汽车社群中,加入即可下载全部报告。
识别二维码加入知识星球,每年可以获得2000+份最新的行业报告,现有报告5000+篇,原价299元/年,现在限时特惠,年费仅50元。相当于每天仅需0.14元。
《未来汽车社群》加入请扫描以下二维码
↓↓↓

PS:加入《未来汽车社群》知识星球1年内可免费下载所有的报告,包括:智能网联、新能源、共享出行、人形机器人、低空经济及传统汽车行业报告等,目前每天仍会新增至少5篇行业报告,欢迎加入。