


微特激光防撞系统
在起重机容易发生碰撞危险的位置安装多线激光雷达传感器,主动探测雷达覆盖区域内物
体入侵的距 离,设置物体入侵报警的距离,系统给出碰撞预警声、光报警及控制动作信
号,从而实现雷达探测区域的 碰撞预防。
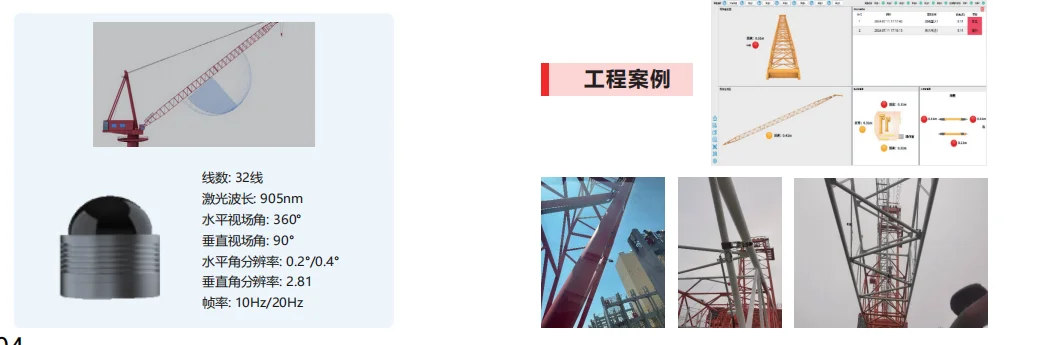
原理:传感器采用混合固态多线激光云台雷达,通过激光发射组件快速旋转的同时发射高
频率激光束 对外界环境进行持续性的扫描,获取障碍物点云运用PCL算法库聚合成像提取
并指定测距对象,实现障碍 物最近点监测。
本方案适用于需高精度测距监测控制的防碰撞预警场景。如造船门座机回转机房、臂架两
侧及下侧等 运行区域周边环境的周界安全监测。
在起重机容易发生碰撞危险的位置安装多线激光雷达传感器,主动探测雷达覆盖区域内物
体入侵的距 离,设置物体入侵报警的距离,系统给出碰撞预警声、光报警及控制动作信
号,从而实现雷达探测区域的 碰撞预防。
原理:传感器采用混合固态多线激光云台雷达,通过激光发射组件快速旋转的同时发射高
频率激光束 对外界环境进行持续性的扫描,获取障碍物点云运用PCL算法库聚合成像提取
并指定测距对象,实现障碍 物最近点监测。
本方案适用于需高精度测距监测控制的防碰撞预警场景。如造船门座机回转机房、臂架两
侧及下侧等 运行区域周边环境的周界安全监测。