





工业机器人的基本原理||机器人是最典型的机电一体化数字化装备,技术附 加值高,应用范围广,作为先进制造业的支撑技术和信 息化社会的新兴产业,将对未来生产和社会发展起越来 越重要的作用。从20世纪下半叶起,世界机器人产业 一直保持着稳步增长的良好势头。根据发达国家产业 发展与升级的历程和工业机器人产业化发展趋势,到 2015年中国机器人市场的容量约达十几万台套。
1工业机器人的基本工作原理
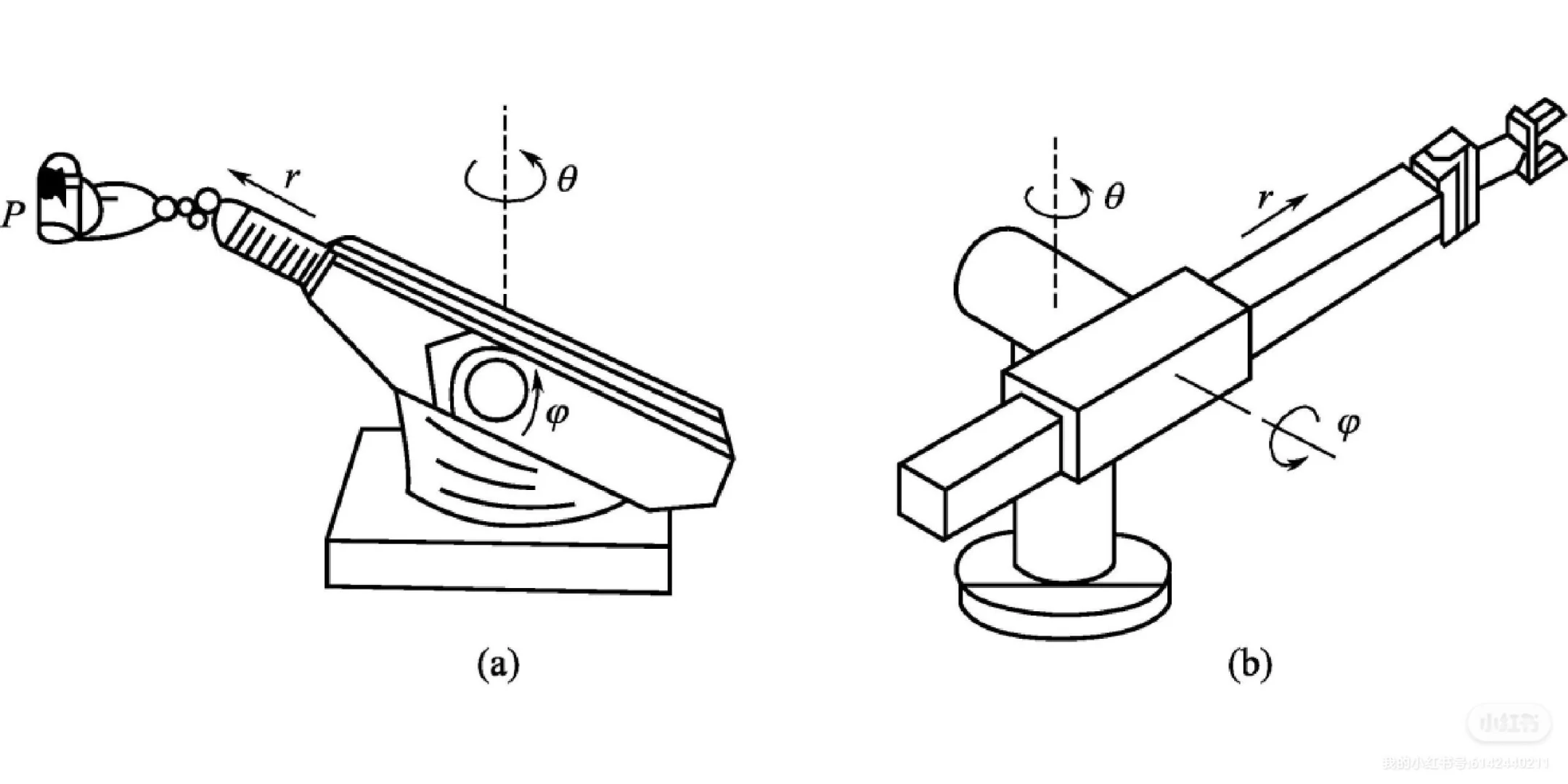
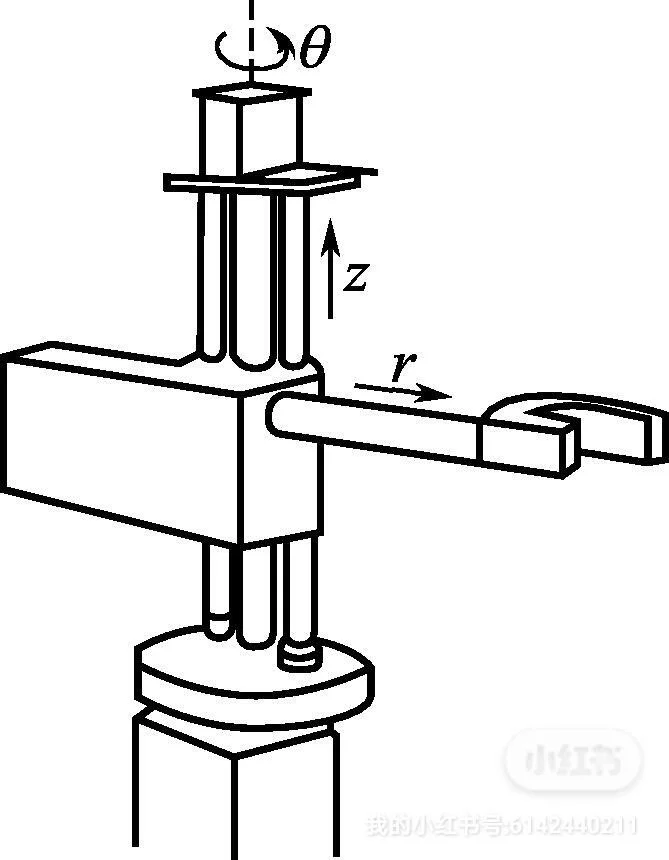
工业机器人是一种生产装备,其基本功能是提供 作业所须的运动和动力.其基本工作原理是通过操作机 上各运动构件的运动.自动地实现手部作业的动作功能 及技术要求。因此在基本功能及基本工作原理上,工业 机器人与机床有相同之处:二者的末端执行器都有位置 变化要求,而且都是通过坐标运动来实现末端执行器的 位置变化要求。当然机器人也有其独特的要求,是按关 节形式运动为主,同时机器人的灵活性要求很高,其刚 度、精度要求相对较低。
2工业机器人结构系统
2.1工业机器人构造
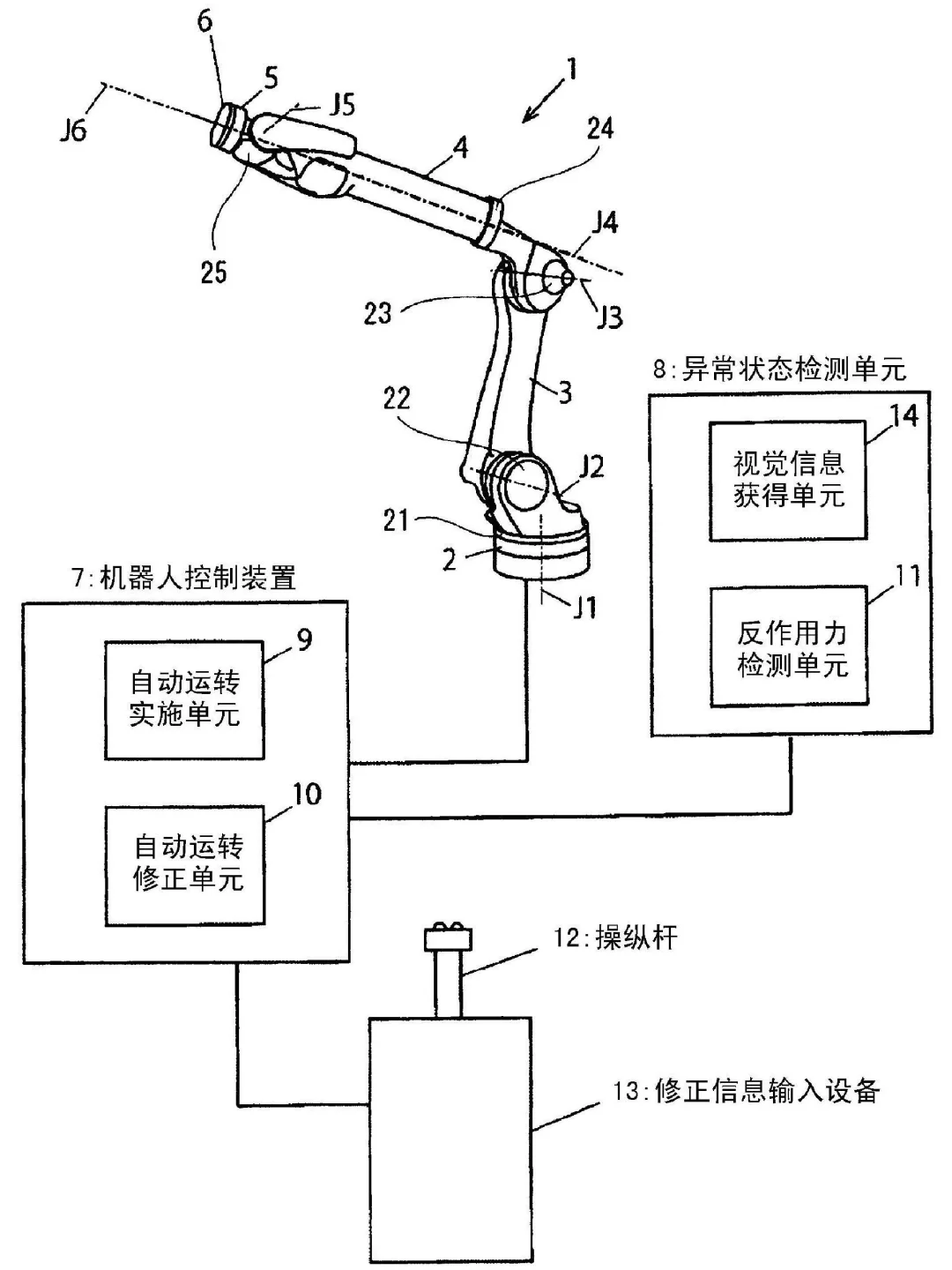
从功能角度分析可将机器人分解成四个部分:操作 机、末端执行器、传感系统、控制器。 操作机:是由机座、手臂和手腕、传动机构、驱动 系统等组成.其功能是使手腕具有某种工作空间,并调 整手腕使末端执行器实现作业任务要求的动作。 末端执行器:也叫工业机器人的手部,它是安装在 工业机器人手腕上直接抓握工件或执行作业的部件。 感器系统:是指要机器人与人一样有效的完成工 作。必须对外界状况进行判断的感觉功能。与机器人控 制最紧密相关的是触觉。视觉适合于检测对象是否存 在,检测其大概的位置、姿势等状态。相比之下,触觉 协助视觉.能够检测出对象更细微的状态。 控制器:机器人控制系统是机器人的大脑,是决定 机器人功能和性能的主要因素。主要是控制工业机器人 在工作空间中的运动位置、姿态和轨迹、操作顺序及动 作的时间等。具有编程简单、软件菜单操作、友好的人 机交互界面、在线操作提示和使用方便等特点。在机器 人中采用的控制系统有:点位的和轮廓的;同步的和异 步的;数字的和模拟的。可根据机器人的技术与经济要 求及工艺任务的特点来选择控制系统的具体方案#工业机器人 #智能自动化 #电气自动化 #机械设计 #结构设计
1工业机器人的基本工作原理
工业机器人是一种生产装备,其基本功能是提供 作业所须的运动和动力.其基本工作原理是通过操作机 上各运动构件的运动.自动地实现手部作业的动作功能 及技术要求。因此在基本功能及基本工作原理上,工业 机器人与机床有相同之处:二者的末端执行器都有位置 变化要求,而且都是通过坐标运动来实现末端执行器的 位置变化要求。当然机器人也有其独特的要求,是按关 节形式运动为主,同时机器人的灵活性要求很高,其刚 度、精度要求相对较低。
2工业机器人结构系统
2.1工业机器人构造
从功能角度分析可将机器人分解成四个部分:操作 机、末端执行器、传感系统、控制器。 操作机:是由机座、手臂和手腕、传动机构、驱动 系统等组成.其功能是使手腕具有某种工作空间,并调 整手腕使末端执行器实现作业任务要求的动作。 末端执行器:也叫工业机器人的手部,它是安装在 工业机器人手腕上直接抓握工件或执行作业的部件。 感器系统:是指要机器人与人一样有效的完成工 作。必须对外界状况进行判断的感觉功能。与机器人控 制最紧密相关的是触觉。视觉适合于检测对象是否存 在,检测其大概的位置、姿势等状态。相比之下,触觉 协助视觉.能够检测出对象更细微的状态。 控制器:机器人控制系统是机器人的大脑,是决定 机器人功能和性能的主要因素。主要是控制工业机器人 在工作空间中的运动位置、姿态和轨迹、操作顺序及动 作的时间等。具有编程简单、软件菜单操作、友好的人 机交互界面、在线操作提示和使用方便等特点。在机器 人中采用的控制系统有:点位的和轮廓的;同步的和异 步的;数字的和模拟的。可根据机器人的技术与经济要 求及工艺任务的特点来选择控制系统的具体方案#工业机器人 #智能自动化 #电气自动化 #机械设计 #结构设计