


一、 问题聚焦:为什么切根是难点?
大葱的根部是加工处理的第一道关卡,也是自动化程度最低、最依赖人工的环节。其核心痛点在于:
非标准化: 大葱根系形状不规则、粗细不一、泥土包裹严重,传统刚性机械无法可靠夹持和定位。
精度要求高: 切根位置要求“去根须、保葱白”,切少了有泥土残留,切多了造成可食用部分的浪费。
环境恶劣: 根部常带有大量泥沙,对机械的磨损和密封性构成挑战。
当前解决方案(如简易旋转刀)存在切损率高、适应性差的问题,无法满足高品质加工需求。
二、 设计目标
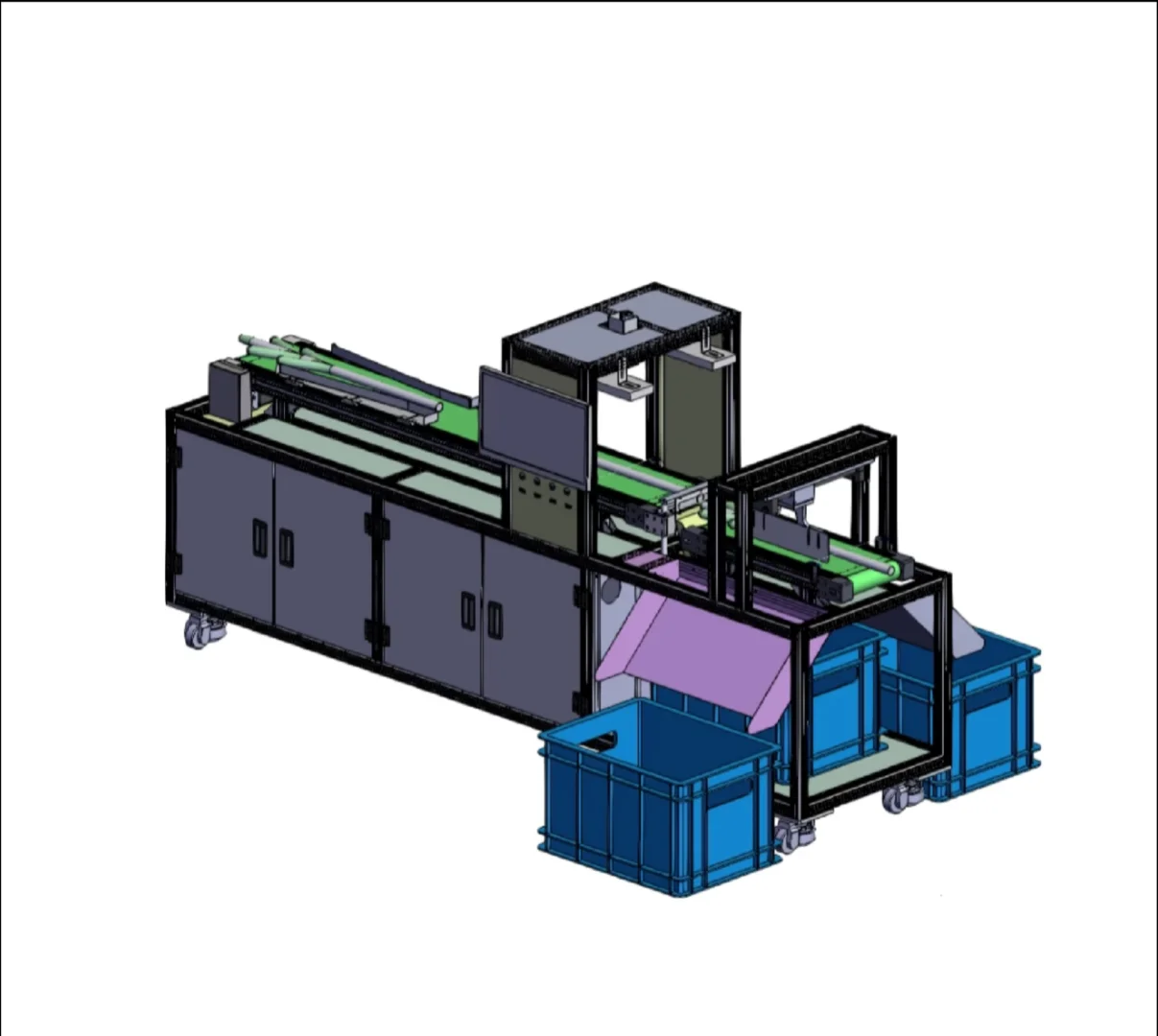
研发一台能够自动识别根部形态、自适应调整切割位点、精准完成切根作业的智能化专用设备,为后续清洗切段模块提供高质量预处理。
三、 核心机械创新设计
本设计的核心在于 “眼”、“脑”、“手” 的协同。
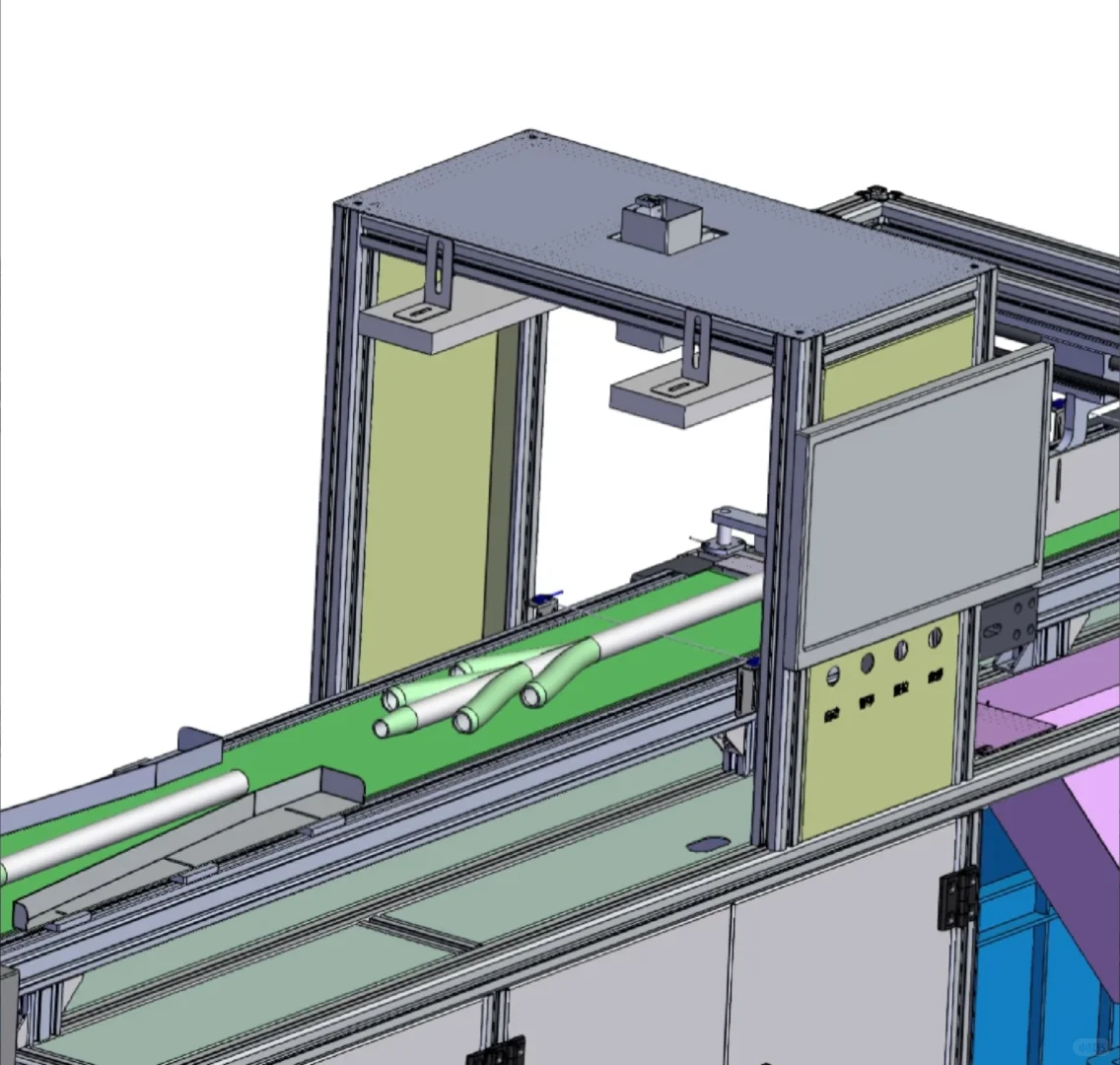
1. “眼”——视觉识别系统
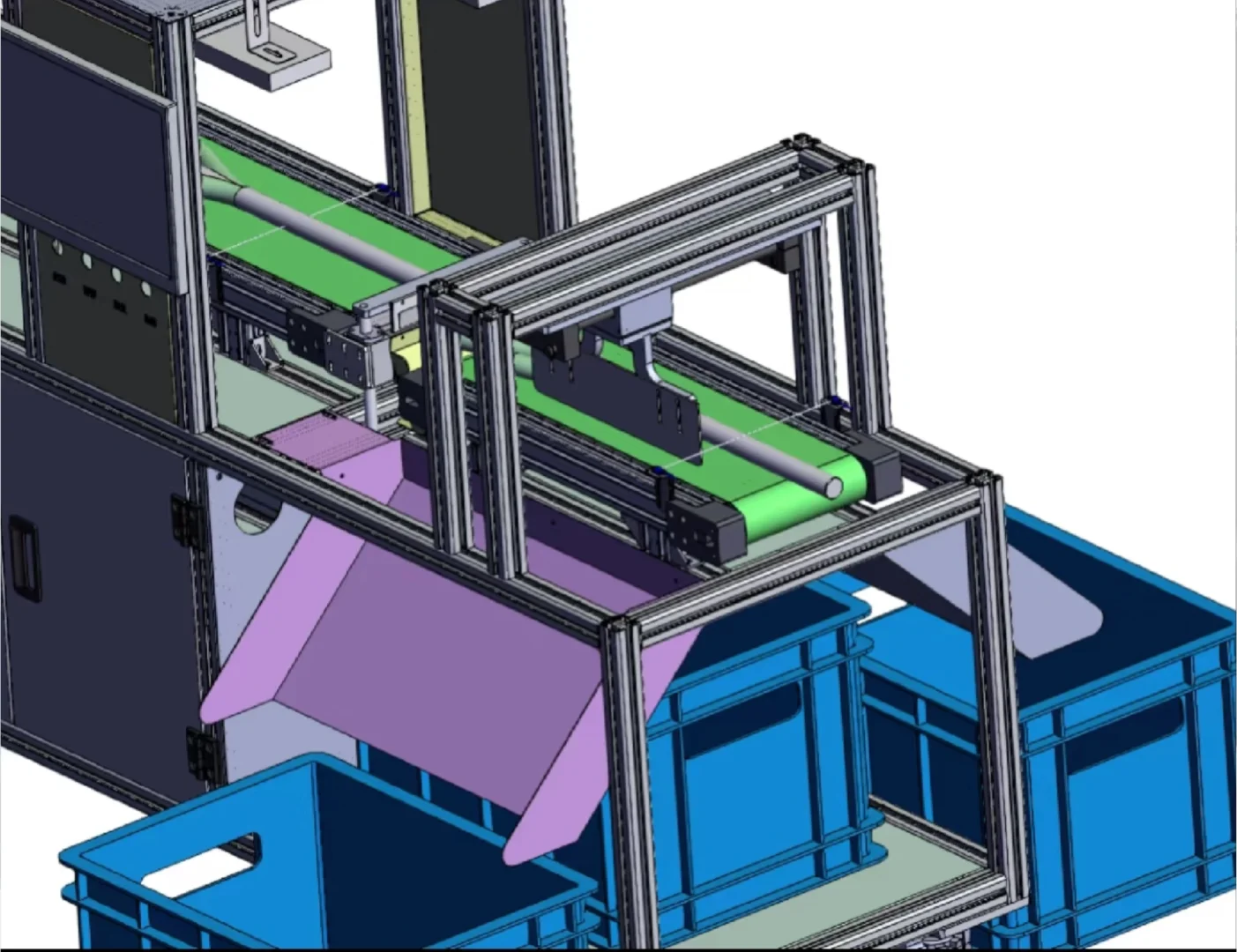
创新设计: 在喂料传送带上方架设工业相机+环形光源,获取大葱根部的清晰图像。
功能: 实时识别根须的起始边界、葱白直径、以及主要泥土附着区域。
2. “脑”——处理与控制单元
创新设计: 内置嵌入式处理器,运行专门的图像处理算法。
功能: 算法将根据视觉信息,快速计算出最优的切割路径(Cutting Path)和切割深度,并将指令发送给执行机构。
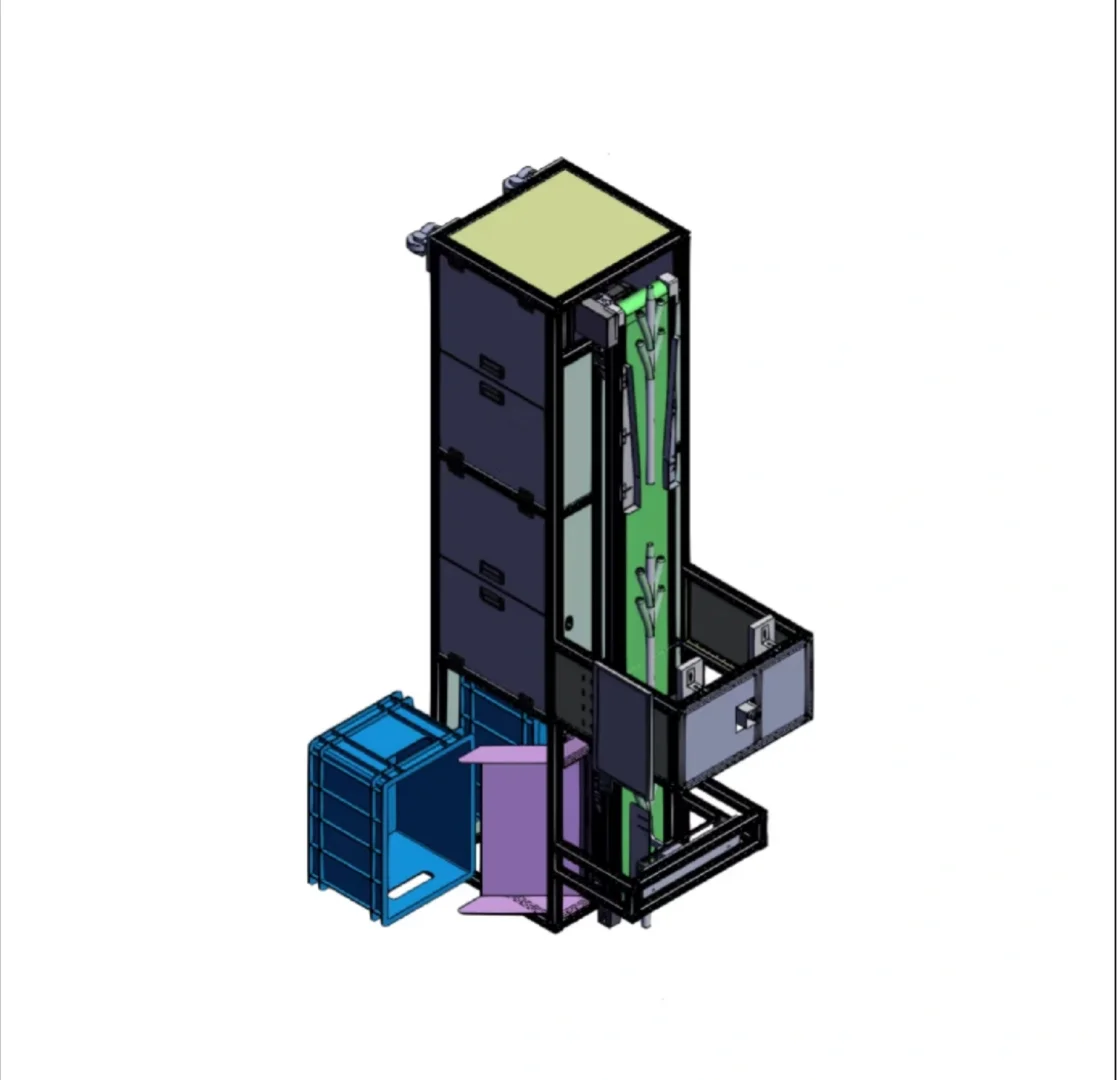
3. “手”——柔性执行机构(核心创新点)
创新设计A:双V带差速对中机构
两根同步运行的V型带以微小速度差运转,大葱根部进入后,会被自动旋转并对中,确保根部以最佳姿态进入切割区。
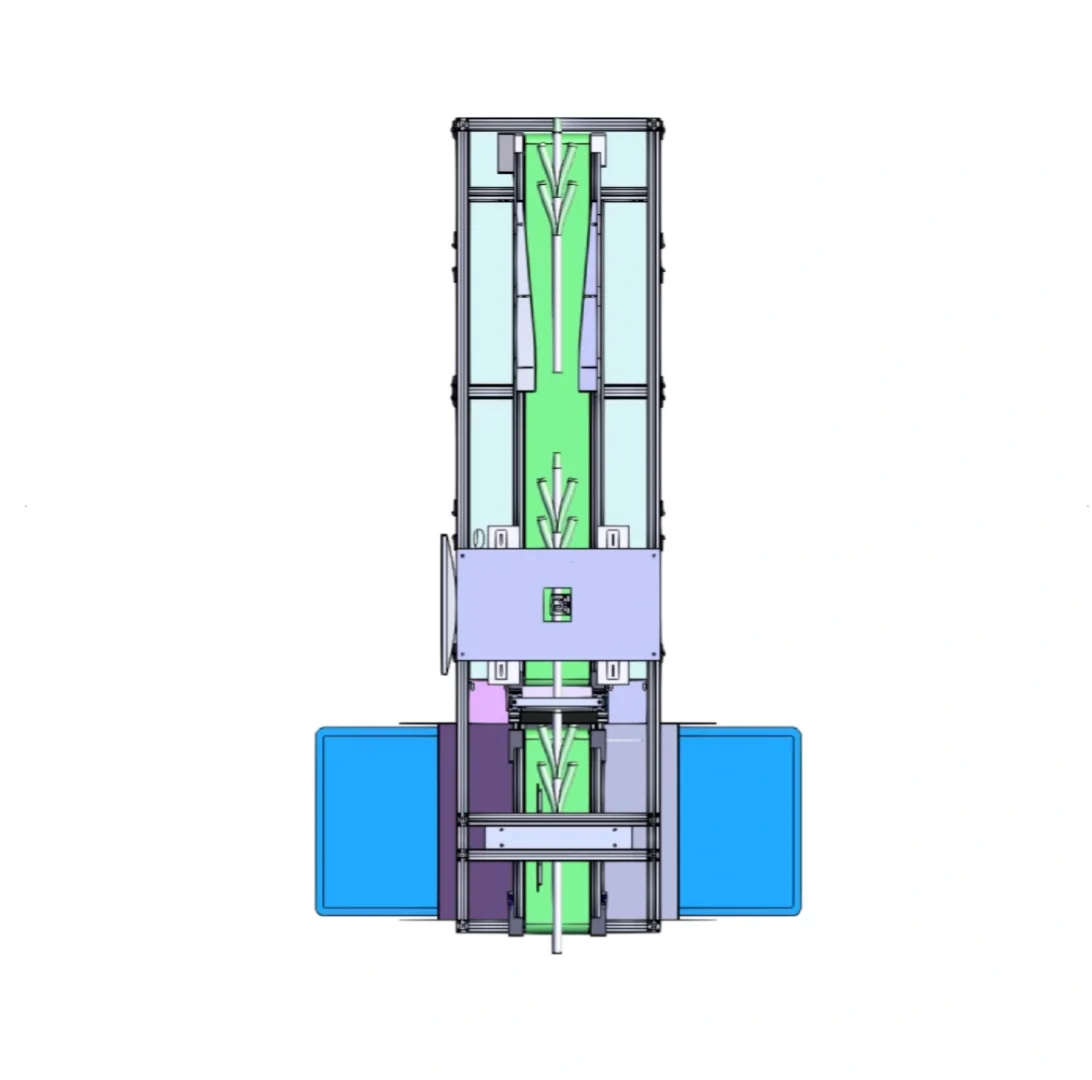
创新设计B:自适应浮动式切刀总成
执行器: 采用高精度步进电机或伺服电机驱动。
刀头设计: 这是最大的机械创新点。我们设计一种“柔性仿形刀盘”。
方案一(旋转式): 刀盘周边并非平整的刀刃,而是装有多个可微小活动的微型刀片。在接触不规则根部时,这些刀片能自适应轮廓,实现仿形剪切,确保根须切除干净,同时避免对圆形葱白造成过多切损。
方案二(往复式): 采用一组高速往复运动的弧形刀片,其运动轨迹可根据控制信号微调,模拟人用刀“刮”根的动作,效率更高。
动力: 切刀总成安装在直线模组上,可根据“大脑”的指令,精准移动到大葱直径所对应的坐标位置进行切割。#全国大学生机械创新设计大赛 #sw建模接单 #机械设计 #结构设计 #机创大赛 #机械创新大赛
大葱的根部是加工处理的第一道关卡,也是自动化程度最低、最依赖人工的环节。其核心痛点在于:
非标准化: 大葱根系形状不规则、粗细不一、泥土包裹严重,传统刚性机械无法可靠夹持和定位。
精度要求高: 切根位置要求“去根须、保葱白”,切少了有泥土残留,切多了造成可食用部分的浪费。
环境恶劣: 根部常带有大量泥沙,对机械的磨损和密封性构成挑战。
当前解决方案(如简易旋转刀)存在切损率高、适应性差的问题,无法满足高品质加工需求。
二、 设计目标
研发一台能够自动识别根部形态、自适应调整切割位点、精准完成切根作业的智能化专用设备,为后续清洗切段模块提供高质量预处理。
三、 核心机械创新设计
本设计的核心在于 “眼”、“脑”、“手” 的协同。
1. “眼”——视觉识别系统
创新设计: 在喂料传送带上方架设工业相机+环形光源,获取大葱根部的清晰图像。
功能: 实时识别根须的起始边界、葱白直径、以及主要泥土附着区域。
2. “脑”——处理与控制单元
创新设计: 内置嵌入式处理器,运行专门的图像处理算法。
功能: 算法将根据视觉信息,快速计算出最优的切割路径(Cutting Path)和切割深度,并将指令发送给执行机构。
3. “手”——柔性执行机构(核心创新点)
创新设计A:双V带差速对中机构
两根同步运行的V型带以微小速度差运转,大葱根部进入后,会被自动旋转并对中,确保根部以最佳姿态进入切割区。
创新设计B:自适应浮动式切刀总成
执行器: 采用高精度步进电机或伺服电机驱动。
刀头设计: 这是最大的机械创新点。我们设计一种“柔性仿形刀盘”。
方案一(旋转式): 刀盘周边并非平整的刀刃,而是装有多个可微小活动的微型刀片。在接触不规则根部时,这些刀片能自适应轮廓,实现仿形剪切,确保根须切除干净,同时避免对圆形葱白造成过多切损。
方案二(往复式): 采用一组高速往复运动的弧形刀片,其运动轨迹可根据控制信号微调,模拟人用刀“刮”根的动作,效率更高。
动力: 切刀总成安装在直线模组上,可根据“大脑”的指令,精准移动到大葱直径所对应的坐标位置进行切割。#全国大学生机械创新设计大赛 #sw建模接单 #机械设计 #结构设计 #机创大赛 #机械创新大赛