





研究单位: 布拉格科技大学
研究背景与问题描述: 研究背景:在核环境中,需要减少人类暴露于有害辐射的风险,同时便于到达常规手段难以触及的区域。目前,利用大型无人飞行器进行辐射检测存在局限性,如成本高、机动性差等。本文提出了一种新型方法,通过微型无人飞行器(MAVs)合作使用康普顿相机进行放射性物质定位。
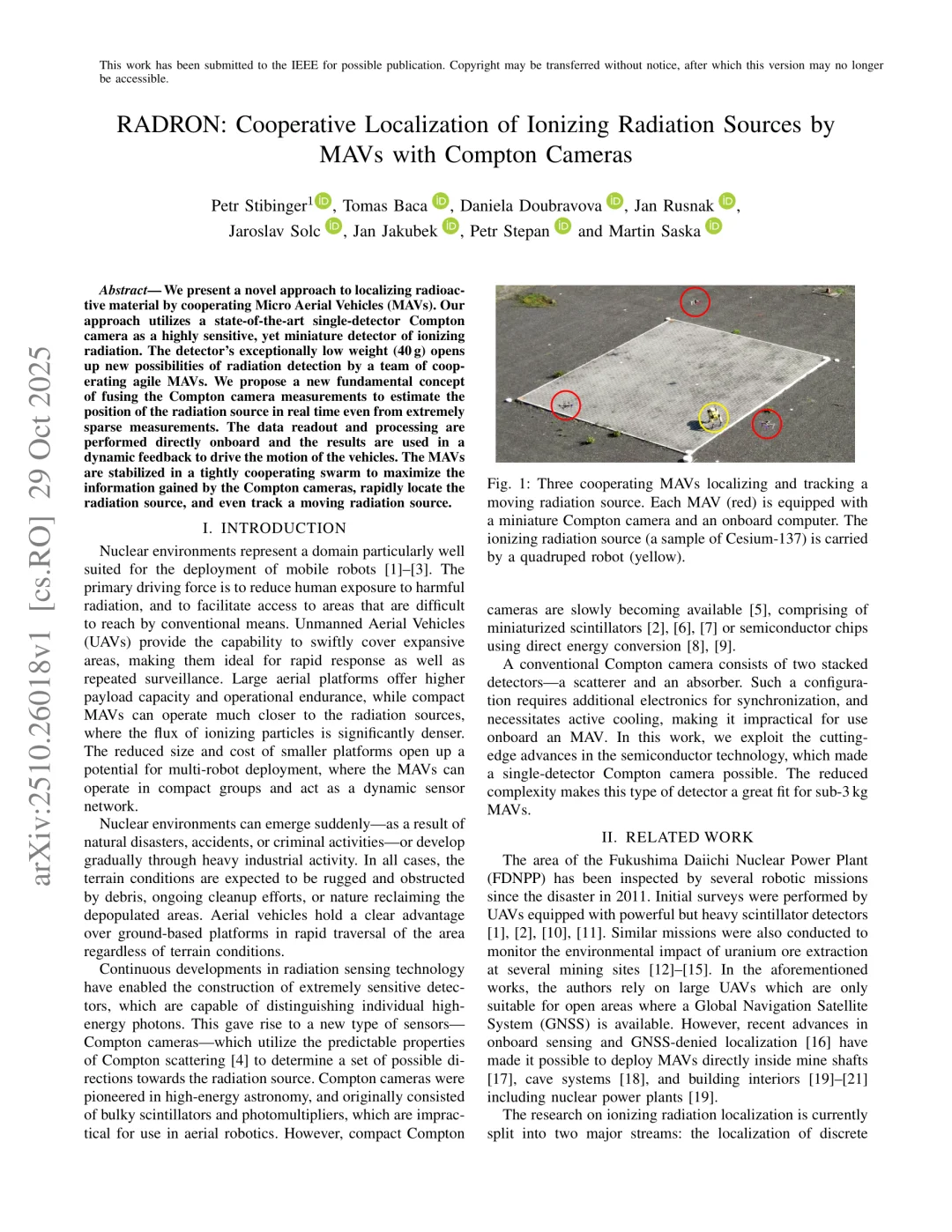
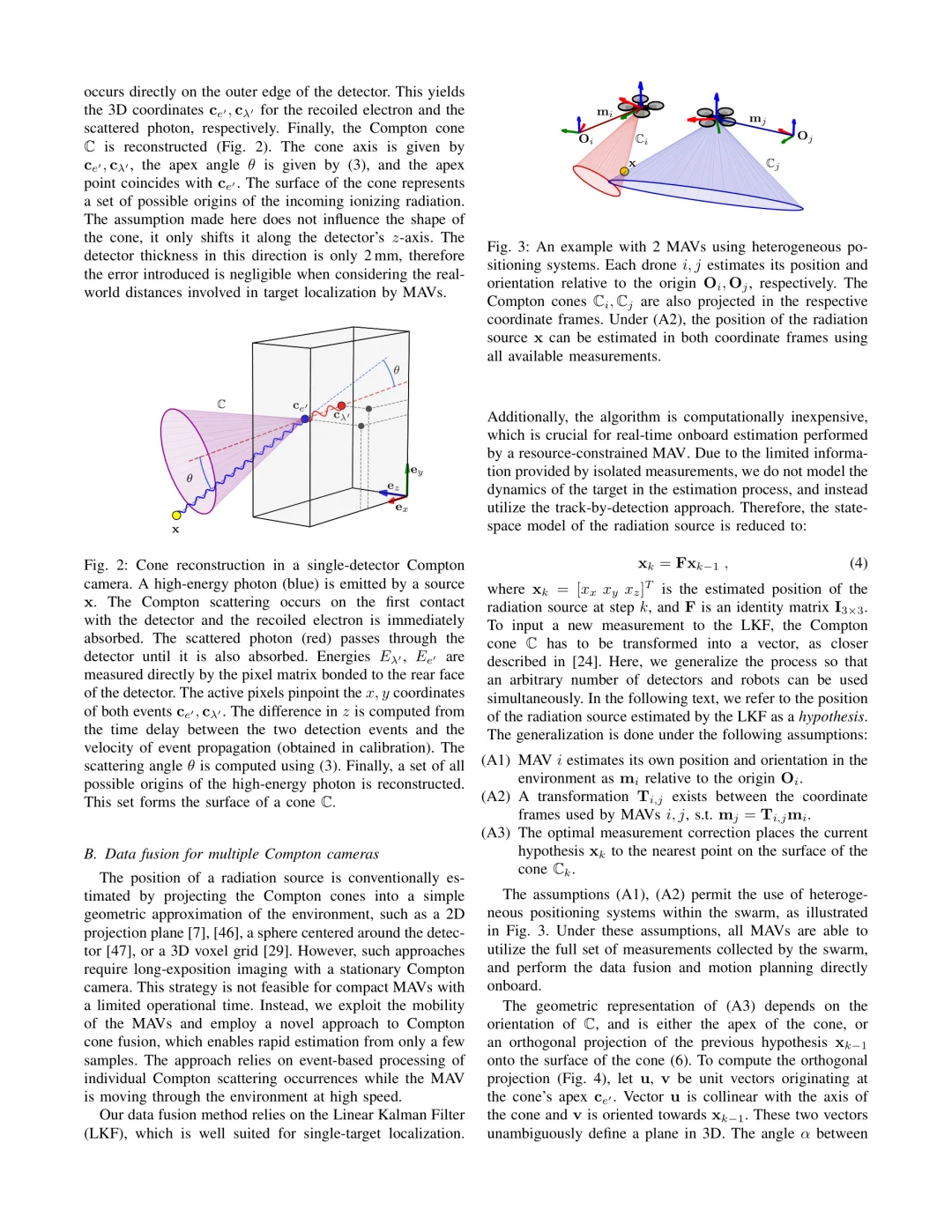
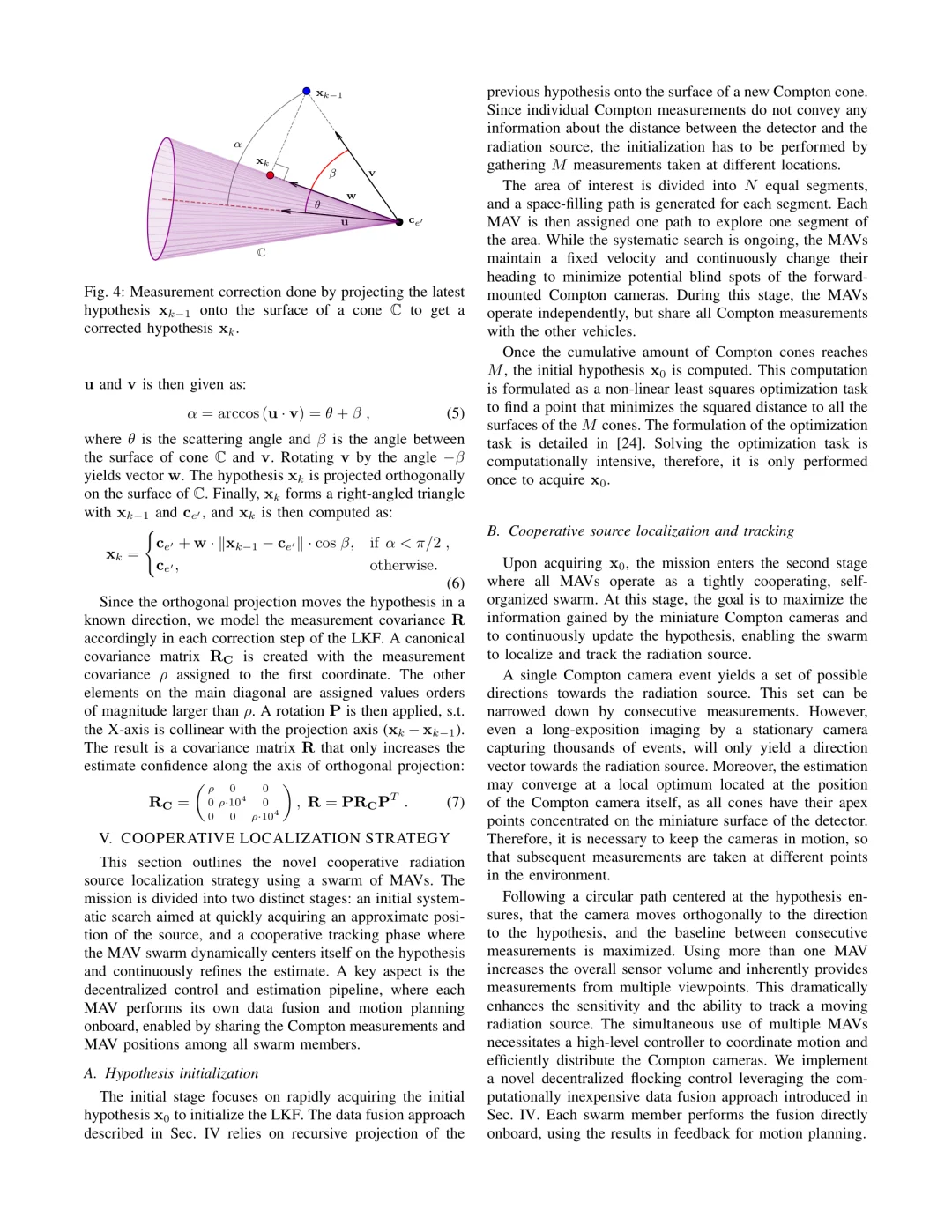
解决方案: 本文采用单探测器康普顿相机作为高度敏感的小型辐射探测器,并提出一种新的基础概念,即融合康普顿相机测量数据以实时估计辐射源位置,即使是从极其稀疏的测量中。数据读出和处理直接在机载计算机上进行,并用于动态反馈驱动车辆运动。MAVs组成紧密合作的群集,最大化信息获取,快#人工智能 #论文解读 #学术分享 速定位辐射源,甚至跟踪移动的辐射源。
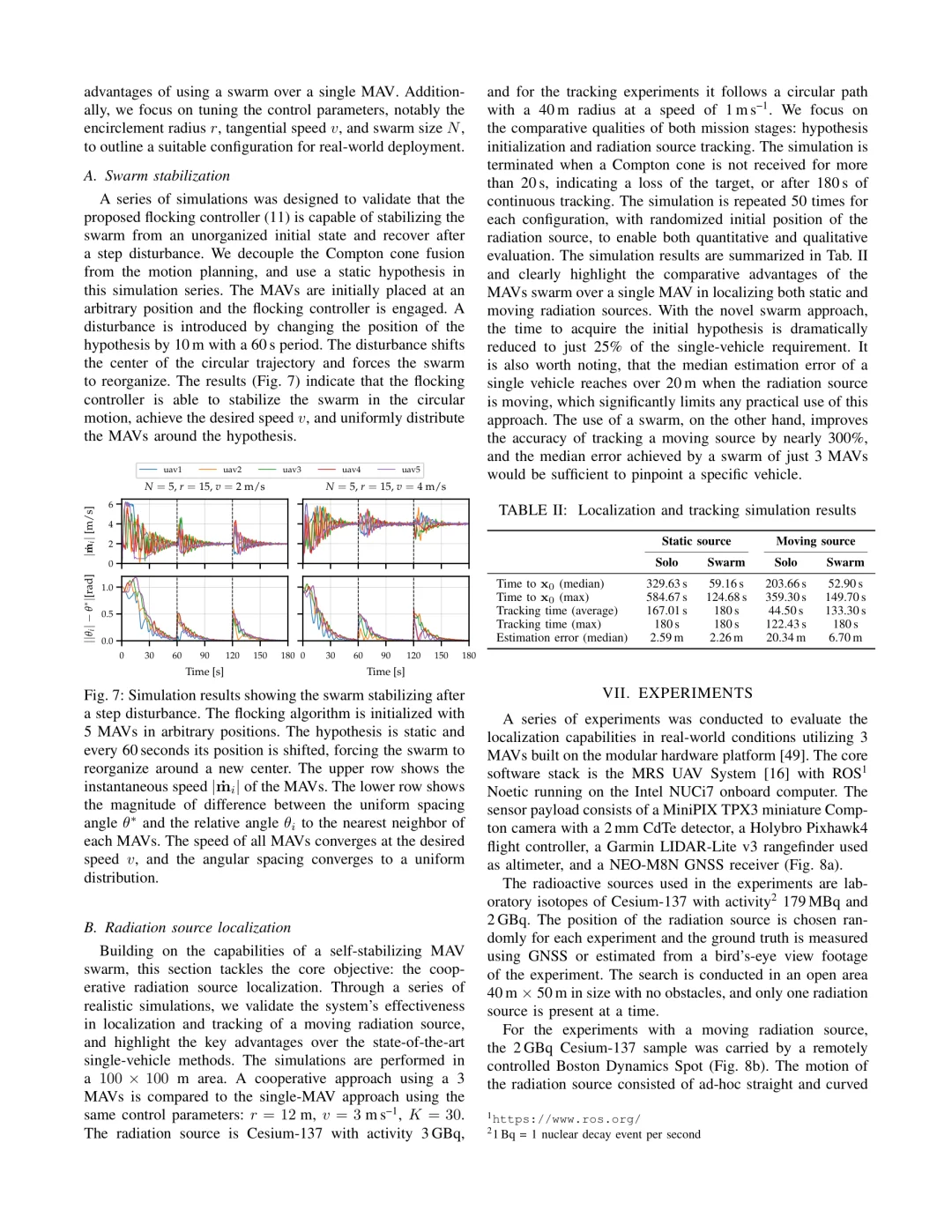
实验: 实验设计:实验包括两个阶段,一是系统化搜索,快速获得辐射源的大致位置;二是合作追踪阶段,MAVs群集动态中心化并不断细化估计。实验在100x100米区域内进行,对比了单个MAV与三个MAVs的合作方式,验证了系统的有效性。
意义与影响: 该方法显著减少了获取初始假设的时间,提高了对移动辐射源的追踪精度,具有重要的实际应用价值。
研究背景与问题描述: 研究背景:在核环境中,需要减少人类暴露于有害辐射的风险,同时便于到达常规手段难以触及的区域。目前,利用大型无人飞行器进行辐射检测存在局限性,如成本高、机动性差等。本文提出了一种新型方法,通过微型无人飞行器(MAVs)合作使用康普顿相机进行放射性物质定位。
解决方案: 本文采用单探测器康普顿相机作为高度敏感的小型辐射探测器,并提出一种新的基础概念,即融合康普顿相机测量数据以实时估计辐射源位置,即使是从极其稀疏的测量中。数据读出和处理直接在机载计算机上进行,并用于动态反馈驱动车辆运动。MAVs组成紧密合作的群集,最大化信息获取,快#人工智能 #论文解读 #学术分享 速定位辐射源,甚至跟踪移动的辐射源。
实验: 实验设计:实验包括两个阶段,一是系统化搜索,快速获得辐射源的大致位置;二是合作追踪阶段,MAVs群集动态中心化并不断细化估计。实验在100x100米区域内进行,对比了单个MAV与三个MAVs的合作方式,验证了系统的有效性。
意义与影响: 该方法显著减少了获取初始假设的时间,提高了对移动辐射源的追踪精度,具有重要的实际应用价值。