



本科阶段即将结束?
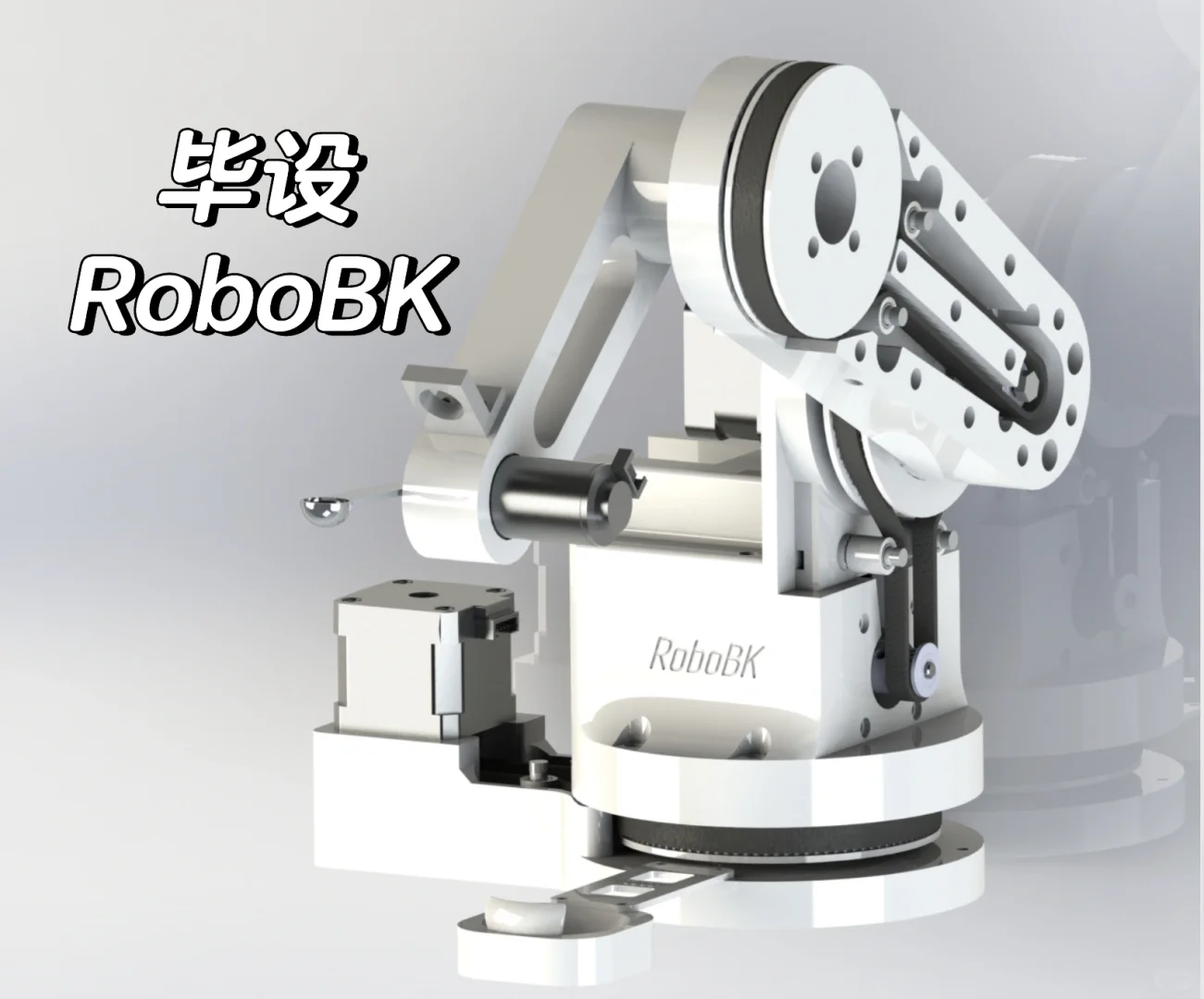
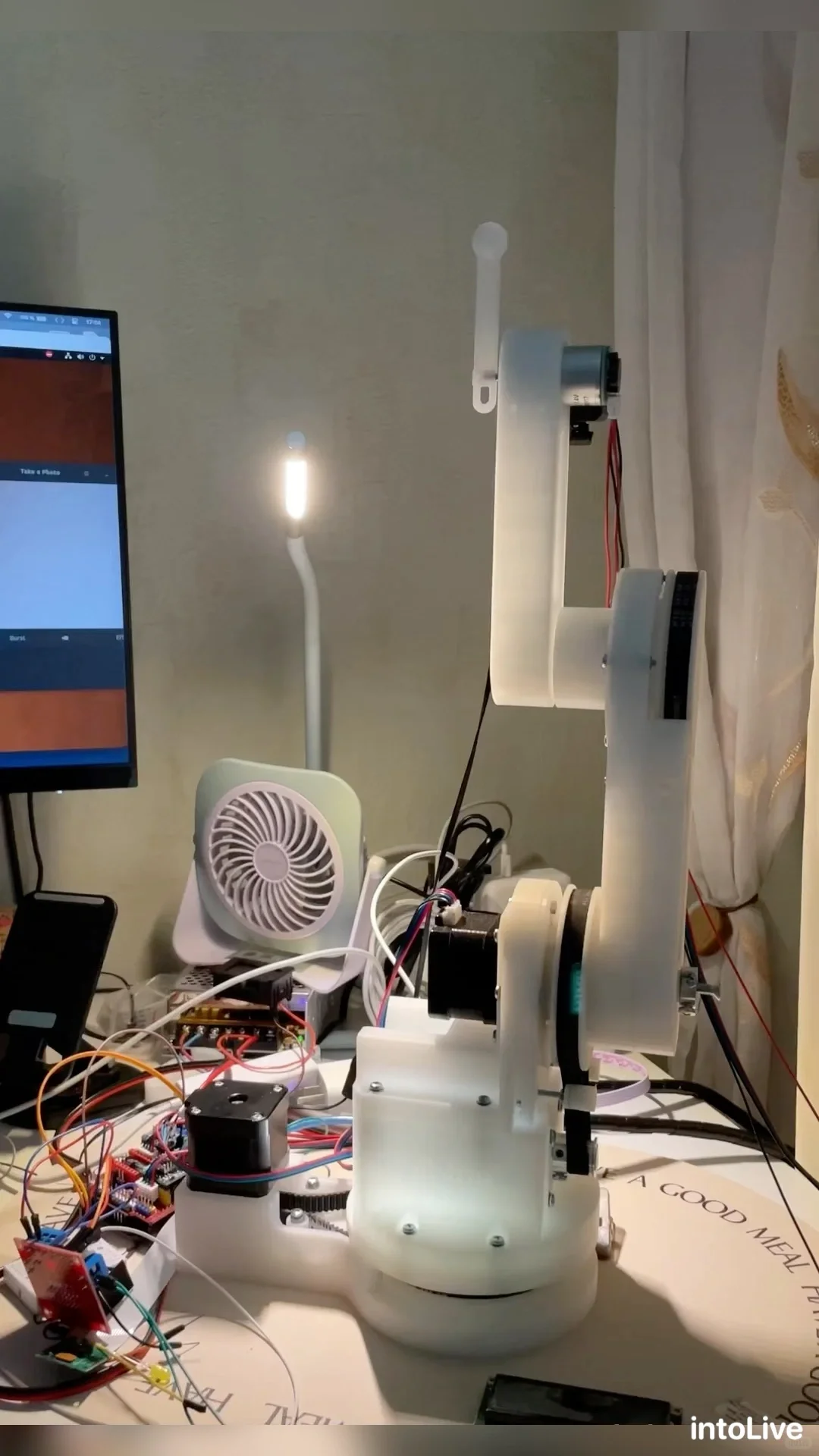
毕设做了了一台4Dof的视觉辅助ROS机械臂,名为RoboBK?.
决定用上下两篇文章来复盘一下整体流程,以便答辩之需?
班门弄斧,请多指教!
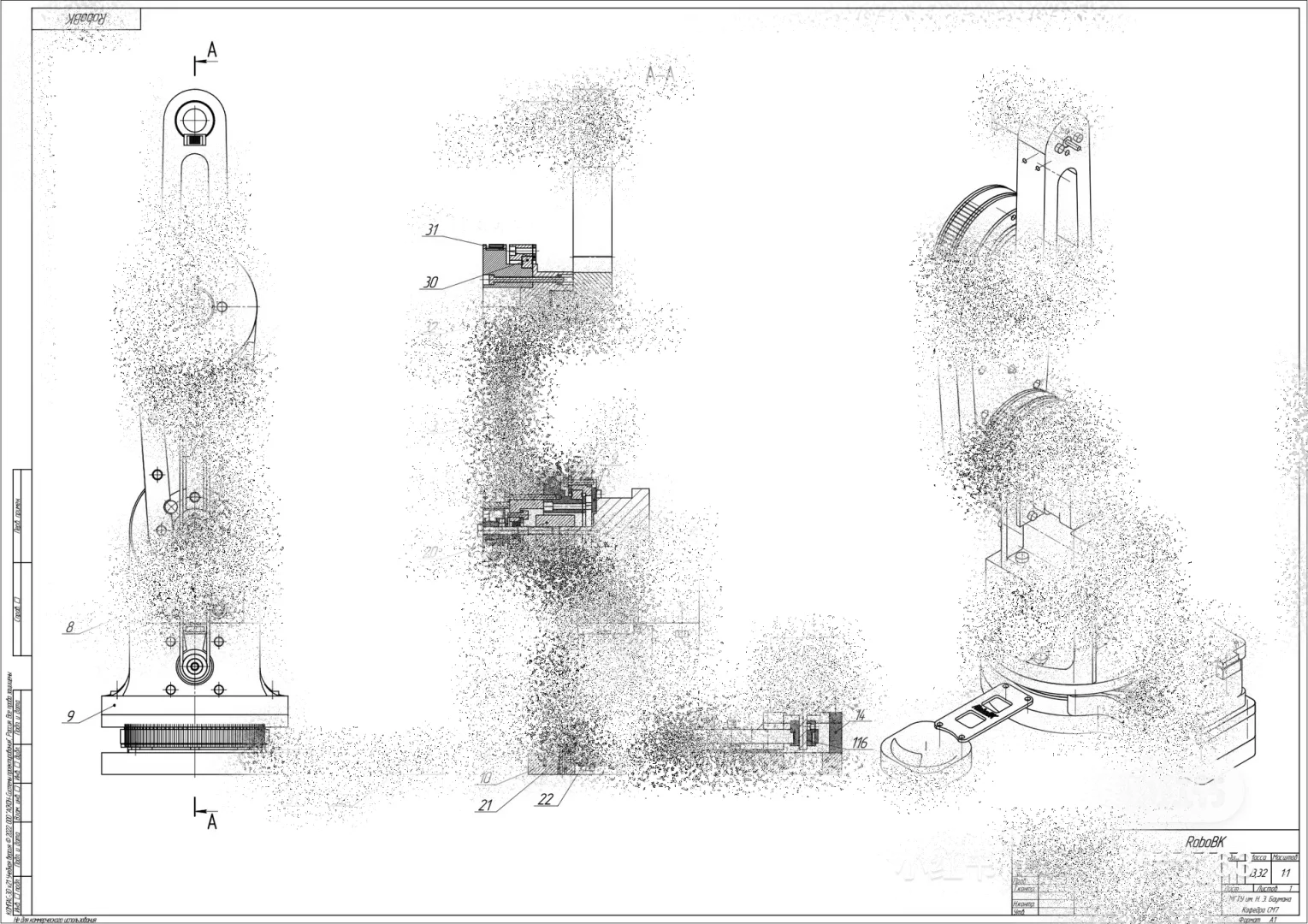
1️⃣SolidWorks/Compus3D机械臂建模:导出urdf,89个零件组成,选型轴承和皮带,整体采用ABS-3D打印.
2️⃣电机选型:前三个DOF采用步进电机,第四个DOF采用直流减速电机(Hall编码器)
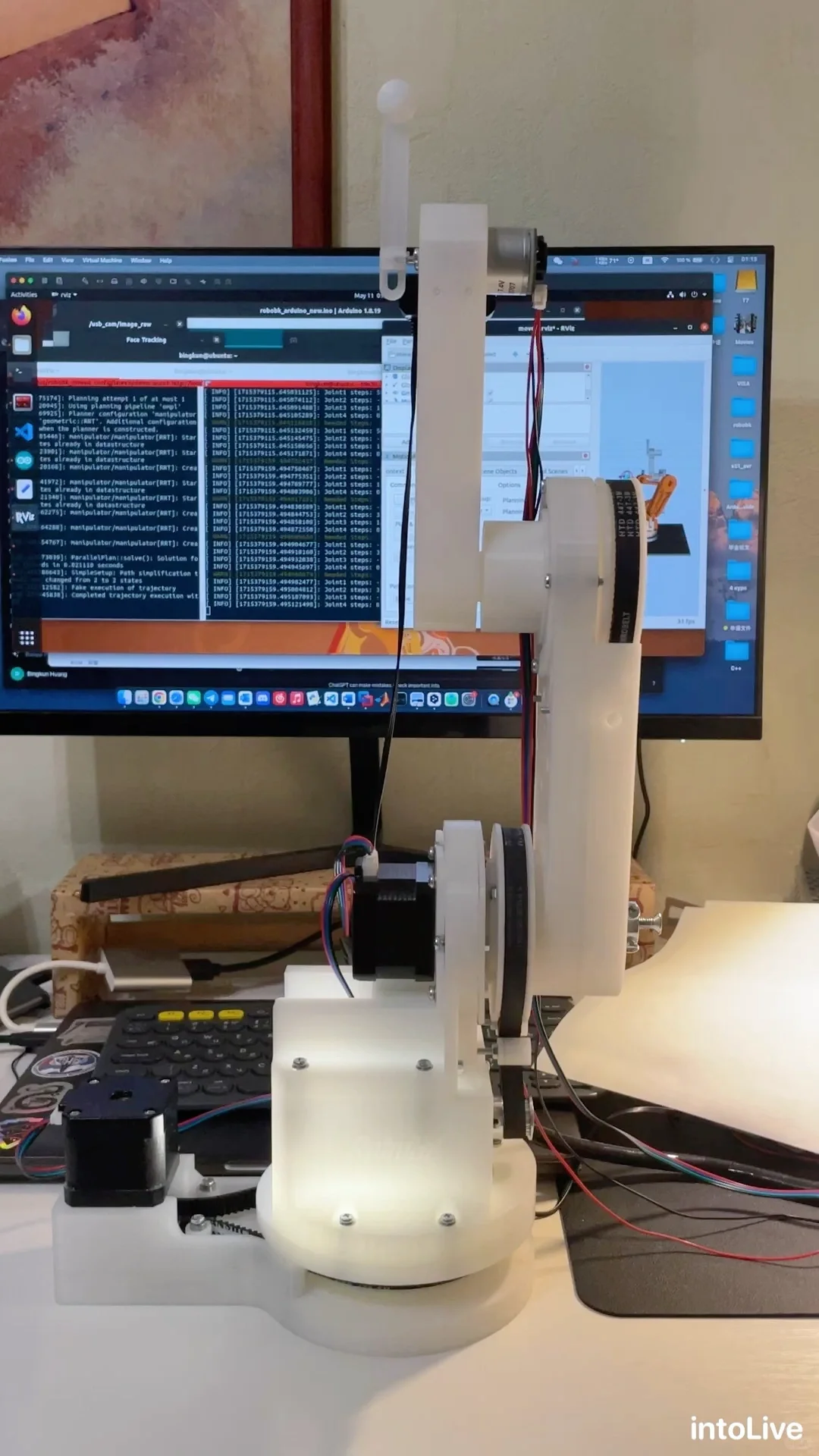
3️⃣上位机下位机选择:由于原本的Raspberry内存不太够,就干脆用了laotop,下位机Arduino
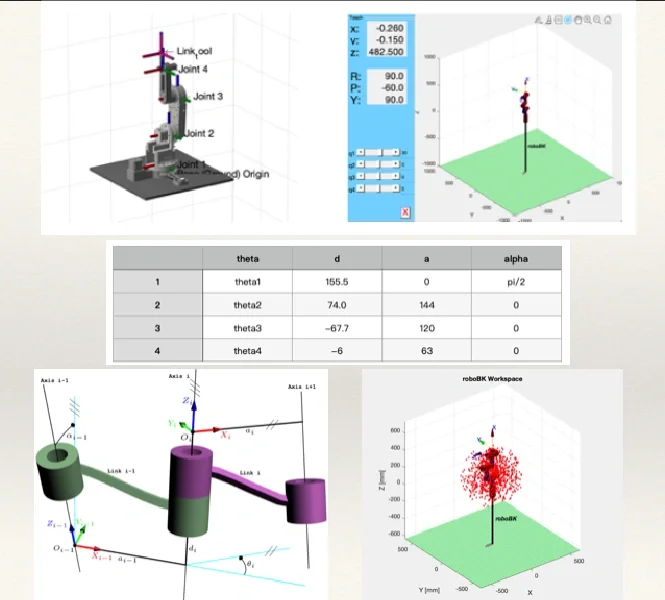
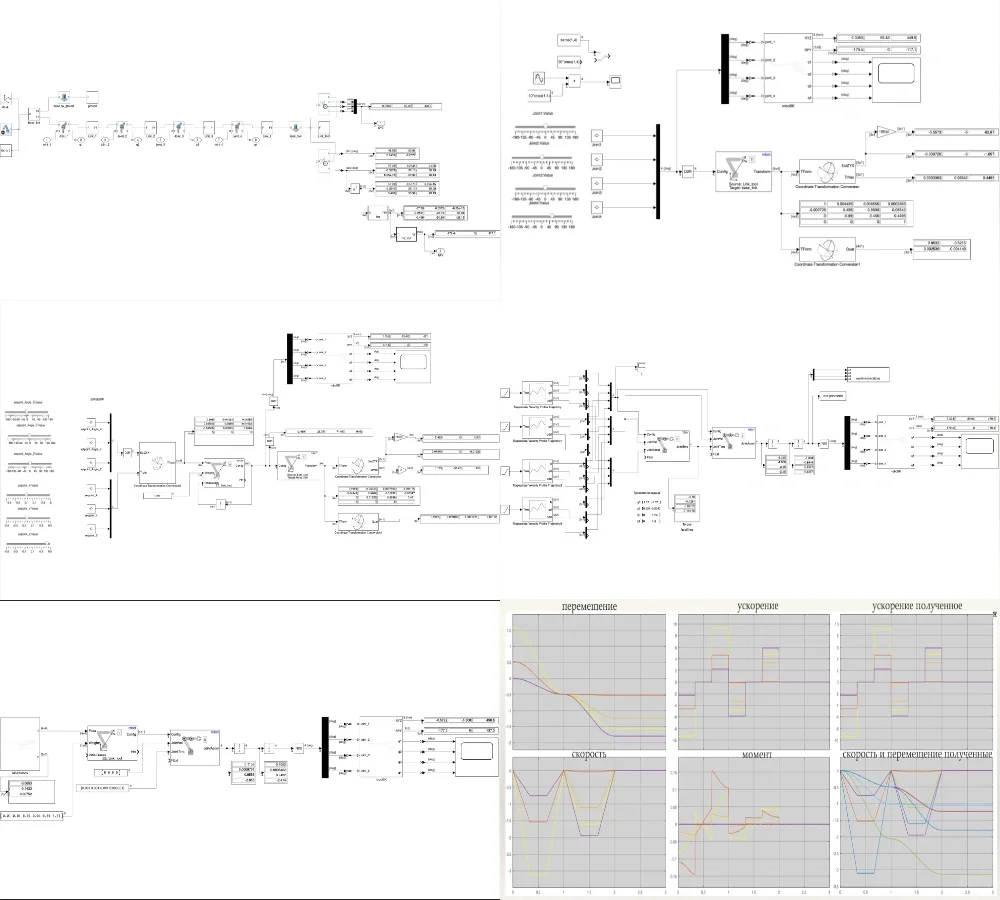
4️⃣运动学动力学建模:DH建模,Matlab simulink仿真,Robotics Toolbox,正逆运动学/动力学分析,工作空间求解,笛卡尔空间轨迹仿真,四元数位姿/雅可比矩阵
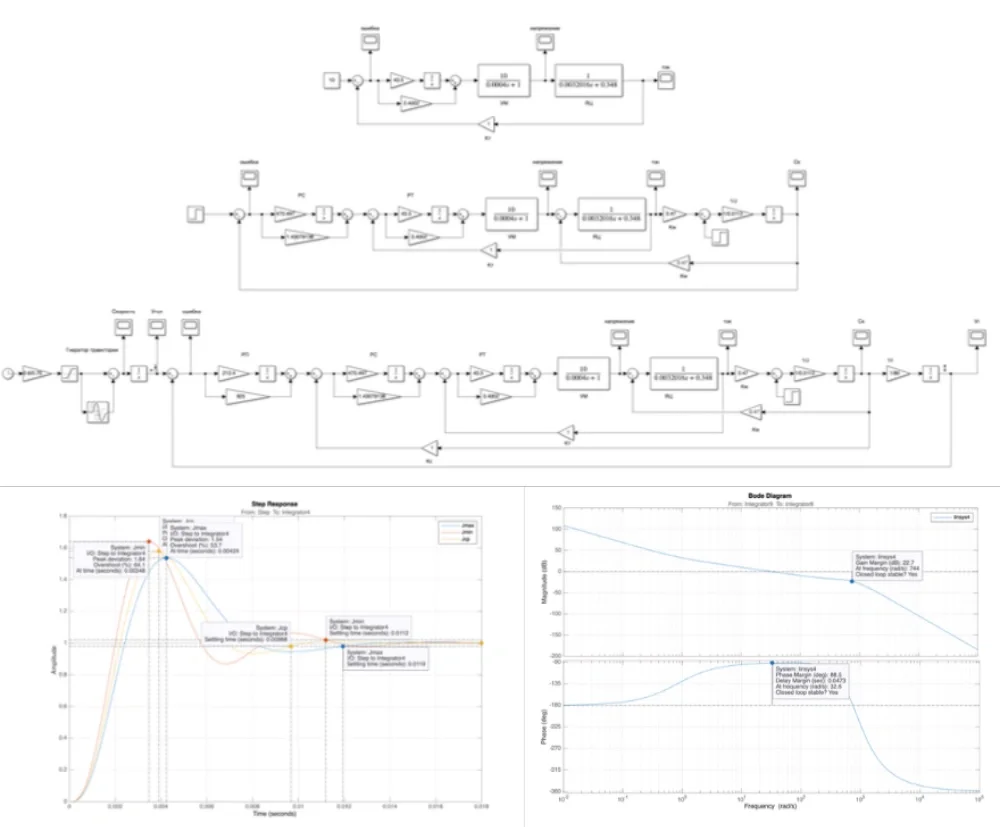
5️⃣DC电机理想状态下三环控制,PID参数计算
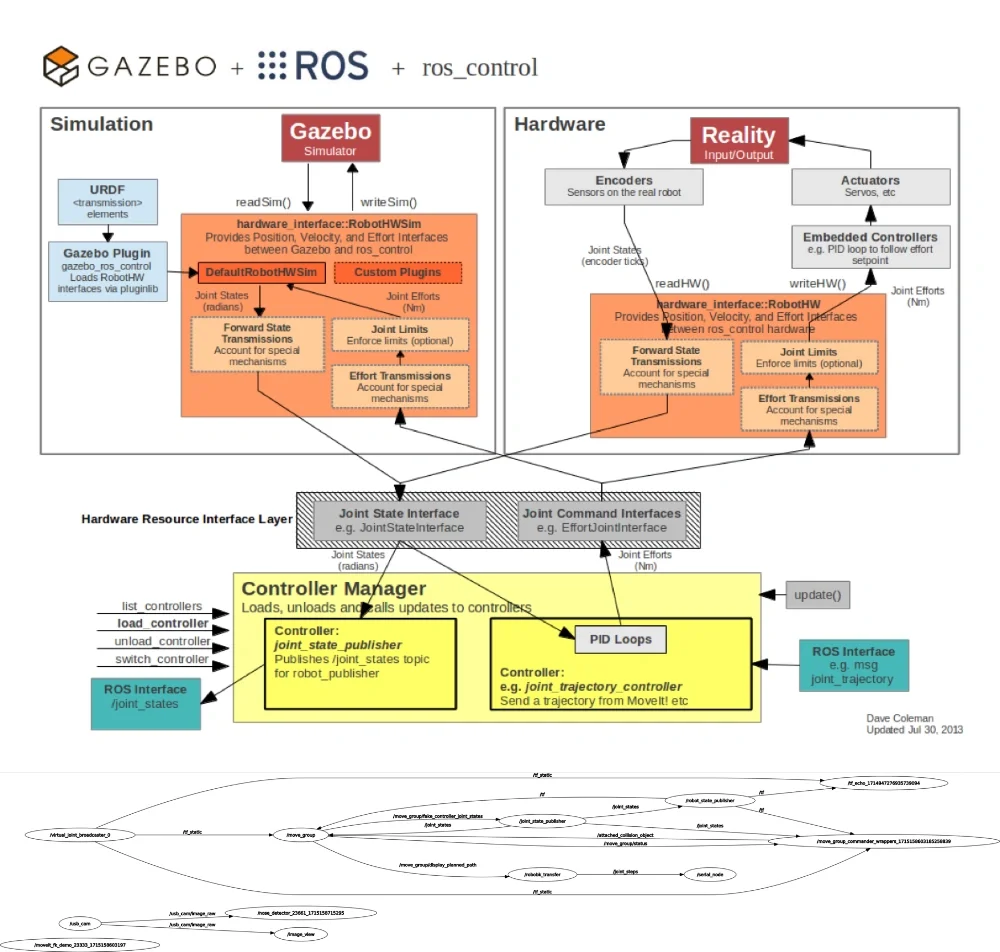
6️⃣ROS机械臂环境搭建,真实机械臂控制与gazebo同步仿真,编程控制机械臂运动。其实这个地方有两个方法,第一个方法是自己写controllers,第二个方法是订阅topics joint_states或者planed_path以连续运动,虽然插补运算一定程度上可以解决机械臂卡顿的问题,但本质上还是途径多个目标点,而步进电机在没有负反馈编码器的前提下,不可能做到仿真中的加速度变化,所以可能最优解就是订阅运动学求解结果,但缺点是会有一定的延迟,并不是真正意义上的synchronous motion
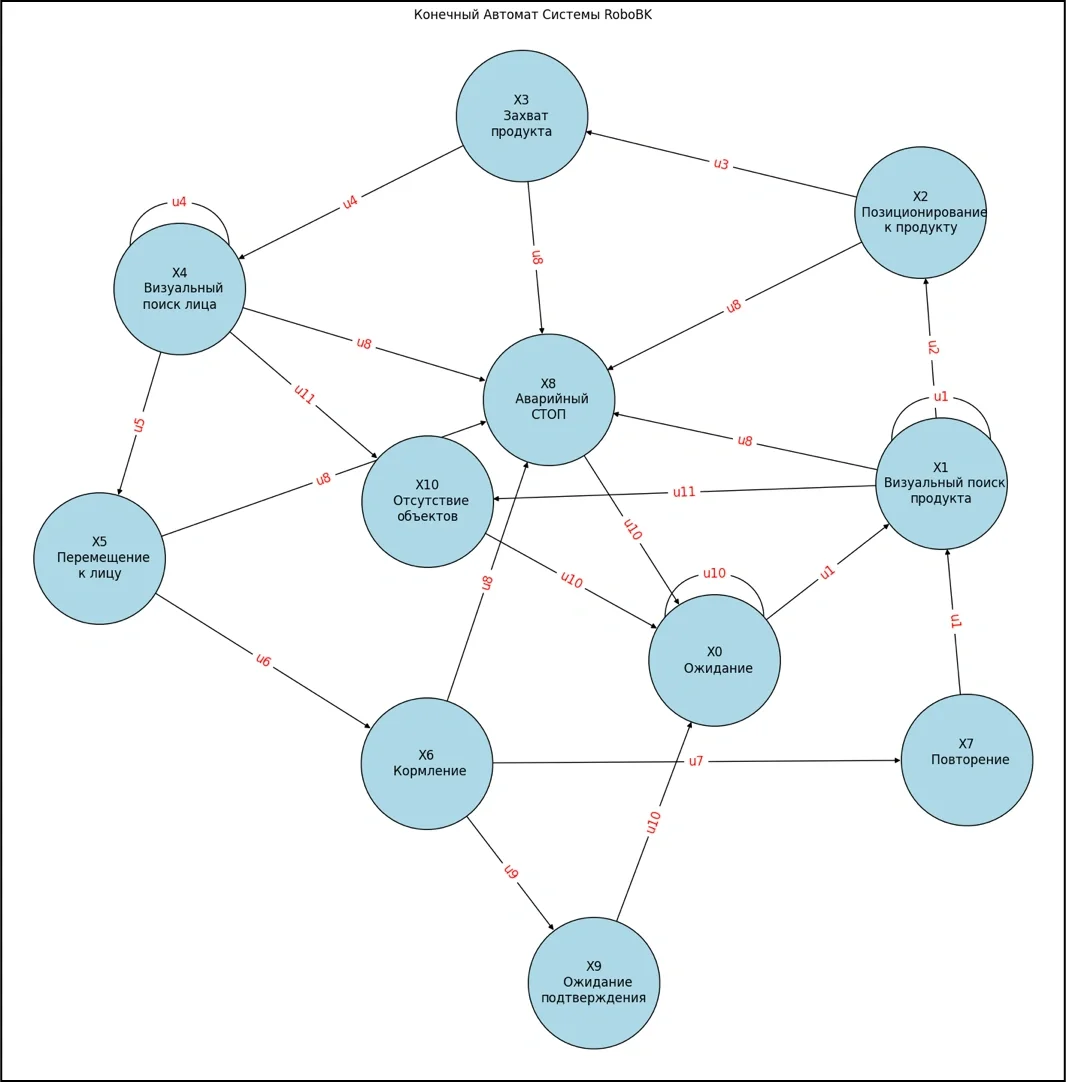
8️⃣有限状态机
…未完待续,随缘更新…
#机械臂#ROS#毕设#机器人
毕设做了了一台4Dof的视觉辅助ROS机械臂,名为RoboBK?.
决定用上下两篇文章来复盘一下整体流程,以便答辩之需?
班门弄斧,请多指教!
1️⃣SolidWorks/Compus3D机械臂建模:导出urdf,89个零件组成,选型轴承和皮带,整体采用ABS-3D打印.
2️⃣电机选型:前三个DOF采用步进电机,第四个DOF采用直流减速电机(Hall编码器)
3️⃣上位机下位机选择:由于原本的Raspberry内存不太够,就干脆用了laotop,下位机Arduino
4️⃣运动学动力学建模:DH建模,Matlab simulink仿真,Robotics Toolbox,正逆运动学/动力学分析,工作空间求解,笛卡尔空间轨迹仿真,四元数位姿/雅可比矩阵
5️⃣DC电机理想状态下三环控制,PID参数计算
6️⃣ROS机械臂环境搭建,真实机械臂控制与gazebo同步仿真,编程控制机械臂运动。其实这个地方有两个方法,第一个方法是自己写controllers,第二个方法是订阅topics joint_states或者planed_path以连续运动,虽然插补运算一定程度上可以解决机械臂卡顿的问题,但本质上还是途径多个目标点,而步进电机在没有负反馈编码器的前提下,不可能做到仿真中的加速度变化,所以可能最优解就是订阅运动学求解结果,但缺点是会有一定的延迟,并不是真正意义上的synchronous motion
8️⃣有限状态机
…未完待续,随缘更新…
#机械臂#ROS#毕设#机器人