


点击蓝字 关注我们
1
人形机器人快速发展, 引领传感器需求爆发
传感器的核心是数据采集,由三部分构成
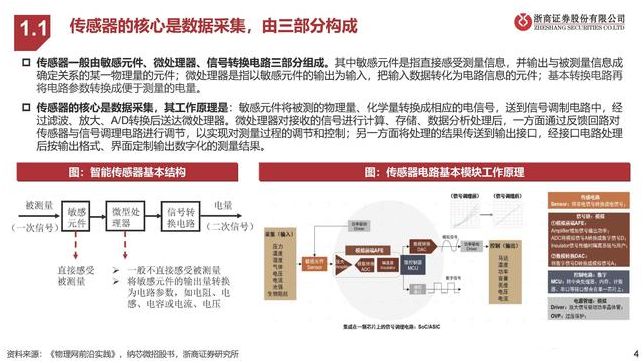
传感器一般由敏感元件、微处理器、信号转换电路三部分组成。其中敏感元件是指直接感受测量信息,并输出与被测量信息成确定关系的某一物理量的元件;微处理器是指以敏感元件的输出为输入,把输入数据转化为电路信息的元件;基本转换电路再将电路参数转换成便于测量的电量。
传感器的核心是数据采集,其工作原理是:敏感元件将被测的物理量、化学量转换成相应的电信号,送到信号调制电路中,经 过滤波、放大、A/D转换后送达微处理器。微处理器对接收的信号进行计算、存储、数据分析处理后,一方面通过反馈回路对 传感器与信号调理电路进行调节,以实现对测量过程的调节和控制;另一方面将处理的结果传送到输出接口,经接口电路处理 后按输出格式、界面定制输出数字化的测量结果。

传感器的发展历程可以分为五个阶段
根据不同的技术特征和应用领域,传感器的发展可以分为机械化时代(人类出现-1870年前后)、电气化时代(1870年-1940 年)、半导体化时代(1940年-1970年)、微机械化时代(1970年-2010年)、智能化时代(2010年至今)五个阶段。智能化时代前,传感器的发展更多关注于传感器原有功能的提升,传感器更像一个独立的个体。进入智能化时代后,下游应用 场景的需求开始被更多考虑,传感器更多作为一个智能化系统的一部分开始发展。传感器在发展过程中体现出的主要趋势是多功能化、高性能化、低成本化、微型化,这也将是未来传感器的发展主要方向。
人形机器人快速发展,有望成为下一个传感器需求爆发方向
从具体的下游分别看,传感器主要聚焦在汽车电子、工业自动化控制、网络通信领域,分别占比达到 24% 、 21%、21%,占 主要部分。此外,消费、医疗等领域对智能传感器的使用量也较为普遍。2023年11月2日,工信部引发《人形机器人创新发展指导意见》,提出人形机器人有望成为继计算机、智能手机、新能源汽车 后的颠覆性产品。与人形机器人相关的传感器包括主要包括力矩传感器、触觉传感器、视觉传感器、惯导传感器、编码器等。随着人形机器人领域的快速发展,此类传感器的需求有望迎来新一波增长。
传感器是人形机器人感知模块的基础
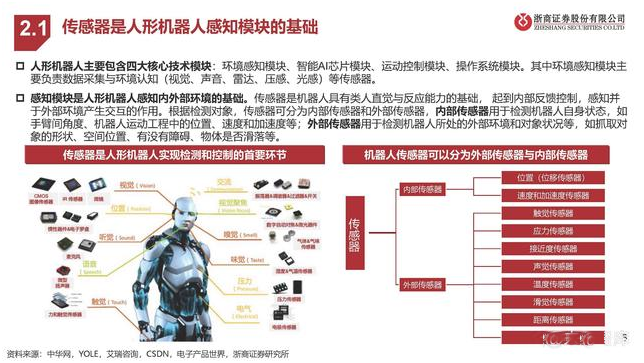
人形机器人主要包含四大核心技术模块:环境感知模块、智能AI芯片模块、运动控制模块、操作系统模块。其中环境感知模块主 要负责数据采集与环境认知(视觉、声音、雷达、压感、光感)等传感器。
感知模块是人形机器人感知内外部环境的基础。传感器是机器人具有类人直觉与反应能力的基础, 起到内部反馈控制,感知并 于外部环境产生交互的作用。根据检测对象,传感器可分为内部传感器和外部传感器,内部传感器用于检测机器人自身状态,如 手臂间角度、机器人运动工程中的位置、速度和加速度等;外部传感器用于检测机器人所处的外部环境和对象状况等,如抓取对 象的形状、空间位置、有没有障碍、物体是否滑落等。
特斯拉人形机器人产业化推进,离不开传感器系统的更新迭代
相较于用于检测人形机器人各个内部系统的内部传感器,用于获取人形机器人的作业对象对外界环境的相关信息的外部传感器价 值量更高,也是目前众多人形机器人应用探索的方向。2023年12月13日,特斯拉通过X平台发布第二代Optimus人形机器人,其运动灵活性和精细操作能力显著提升,这离不开人形机 器人传感器系统的更新和优化。Optimus身体关节主要应用了力矩传感器,以感受末端复杂多维的力;手部主要应用了触觉传感 器,实现精细运控。
随人形机器人拟人化程度提升,传感器用量提升空间大
根据灵巧手龙头Shadow Robot在公司官网披露的信息, 其Shadow灵巧手使用了129个传感器,以最大程度的模仿人手的功能。每一个灵巧手拥有和人手同等数量的24个关节和20个可单独控制的自由度,使用的传感器包括指尖压力传感器,张力传感器等。哈尔滨工业大学与德国宇航中心机器人与系统动力学研究所联合开发的DLR灵巧手具有12个关节,由线性驱动器驱动。DLR-I手 共具有112个传感器,大约1000个机械零件和1500个电子元件。为实现手的精确操作,每个手指的指尖安装了一个微型6维力/ 力矩传感器,每个手指指尖的输出力为30N。
全球传感器市场庞大,中国传感器市场占比逐渐提升
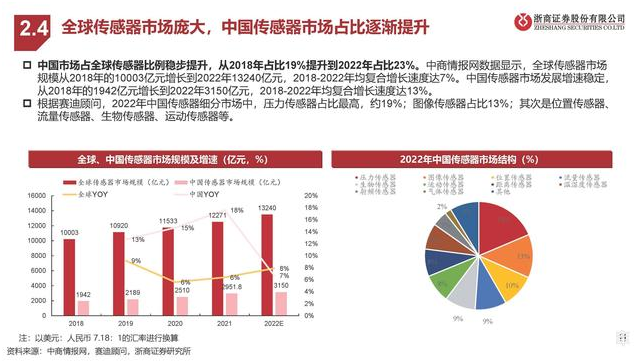
中国市场占全球传感器比例稳步提升,从2018年占比19%提升到2022年占比23%。中商情报网数据显示,全球传感器市场 规模从2018年的10003亿元增长到2022年13240亿元,2018-2022年均复合增长速度达7%。中国传感器市场发展增速稳定, 从2018年的1942亿元增长到2022年3150亿元,2018-2022年均复合增长速度达13%。根据赛迪顾问,2022年中国传感器细分市场中,压力传感器占比最高,约19%;图像传感器占比13%;其次是位置传感器、 流量传感器、生物传感器、运动传感器等。
2
力矩传感器:关节部位感知并度量力的关键部件
力矩传感器是人形机器人关节处感知并度量力矩的核心
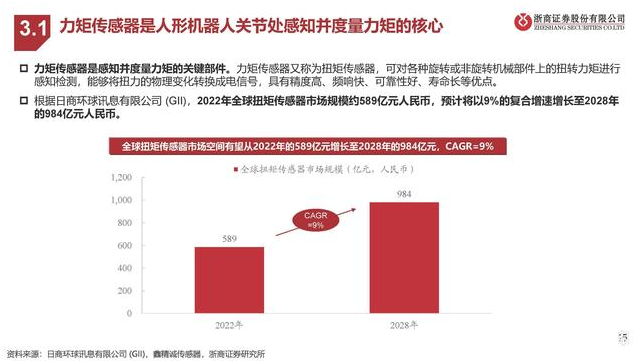
力矩传感器是感知并度量力矩的关键部件。力矩传感器又称为扭矩传感器,可对各种旋转或非旋转机械部件上的扭转力矩进行 感知检测,能够将扭力的物理变化转换成电信号,具有精度高、频响快、可靠性好、寿命长等优点。根据日商环球讯息有限公司 (GII),2022年全球扭矩传感器市场规模约589亿元人民币,预计将以9%的复合增速增长至2028年 的984亿元人民币。
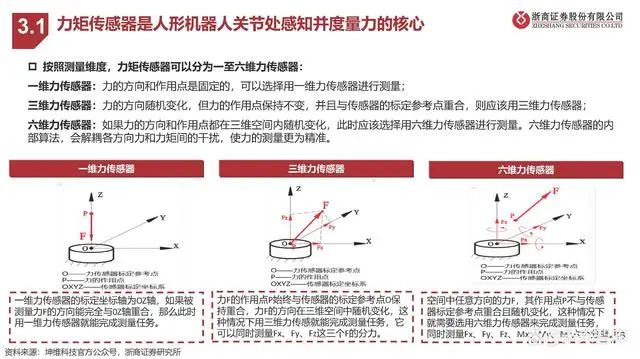
按照测量维度,力矩传感器可以分为一至六维力传感器:一维力传感器:力的方向和作用点是固定的,可以选择用一维力传感器进行测量;三维力传感器:力的方向随机变化,但力的作用点保持不变,并且与传感器的标定参考点重合,则应该用三维力传感器;六维力传感器:如果力的方向和作用点都在三维空间内随机变化,此时应该选择用六维力传感器进行测量。六维力传感器的内 部算法,会解耦各方向力和力矩间的干扰,使力的测量更为精准。
应变式六维力矩传感器性能优异、应用广泛
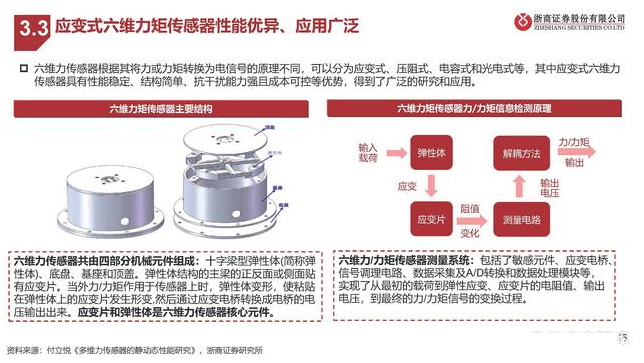
六维力传感器根据其将力或力矩转换为电信号的原理不同,可以分为应变式、压阻式、电容式和光电式等,其中应变式六维力 传感器具有性能稳定、结构简单、抗干扰能力强且成本可控等优势,得到了广泛的研究和应用。
六维联合加载设备是六维力传感器生产制造中的重要设备
标定与检测:标定即建立传感器原始信号和受力之间的映射关系,获得传感器的固件参数;检测是获得传感器的精准度。六维力传感器的标定、检测与一维力传感器相比工作量更大、设备要求更高、理论基础更深,采用六维力联合加载标定, 才能使传感器的准度更好、串扰更低。六维联合加载设备是高精度六维力传感器研发和生产的必要条件,它可以对力觉传感器实现正交三个方向力和三个方向 力矩的同时精确加载,只有在传感器标定和检测过程中采用这种六维联合加载的方式,才能实现优于0.5%FS准度。
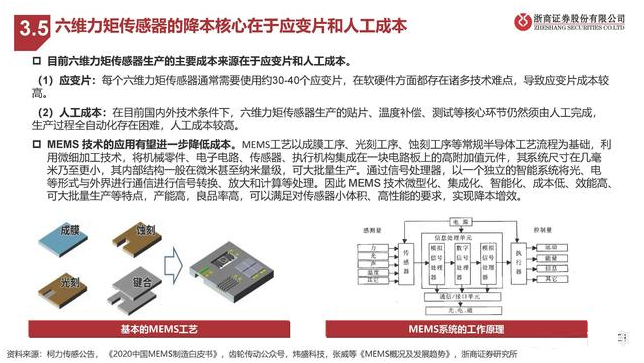
六维力矩传感器的降本核心在于应变片和人工成本
目前六维力矩传感器生产的主要成本来源在于应变片和人工成本。(1)应变片:每个六维力矩传感器通常需要使用约30-40个应变片,在软硬件方面都存在诸多技术难点,导致应变片成本较 高。(2)人工成本:在目前国内外技术条件下,六维力矩传感器生产的贴片、温度补偿、测试等核心环节仍然须由人工完成, 生产过程全自动化存在困难,人工成本较高。
MEMS 技术的应用有望进一步降低成本。MEMS工艺以成膜工序、光刻工序、蚀刻工序等常规半导体工艺流程为基础,利 用微细加工技术,将机械零件、电子电路、传感器、执行机构集成在一块电路板上的高附加值元件,其系统尺寸在几毫 米乃至更小,其内部结构一般在微米甚至纳米量级,可大批量生产。通过信号处理器,以一个独立的智能系统将光、电 等形式与外界进行通信进行信号转换、放大和计算等处理。因此 MEMS 技术微型化、集成化、智能化、成本低、效能高、 可大批量生产等特点,产能高,良品率高,可以满足对传感器小体积、高性能的要求,实现降本增效。
3
触觉传感器:灵巧手实现触觉感知 功能的关键部件
触觉传感器目前主要有MEMS、电子皮肤两种技术实现路径
1)MEMS压力阵列传感器:通过测量介质的压力来实现对物理量的检测。其基本原理是利用微机电系统技术制造出微小结构,通 过这些结构对介质产生的压力进行敏感检测,并将检测到的信号转换为可读取的电信号。
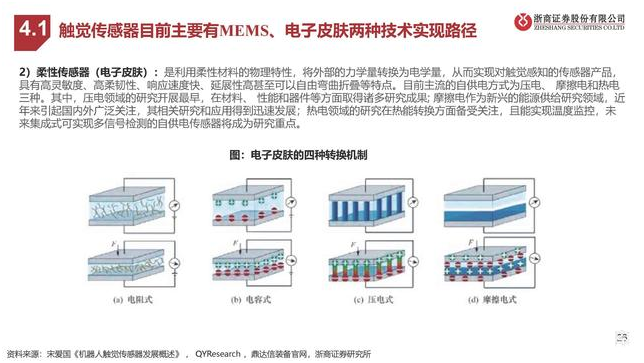
2)柔性传感器(电子皮肤):是利用柔性材料的物理特性,将外部的力学量转换为电学量,从而实现对触觉感知的传感器产品, 具有高灵敏度、高柔韧性、响应速度快、延展性高甚至可以自由弯曲折叠等特点。目前主流的自供电方式为压电、 摩擦电和热电 三种。其中,压电领域的研究开展最早,在材料、 性能和器件等方面取得诸多研究成果; 摩擦电作为新兴的能源供给研究领域,近 年来引起国内外广泛关注,其相关研究和应用得到迅速发展;热电领域的研究在热能转换方面备受关注,且能实现温度监控,未 来集成式可实现多信号检测的自供电传感器将成为研究重点。
4
视觉传感器:人形机器人的眼睛
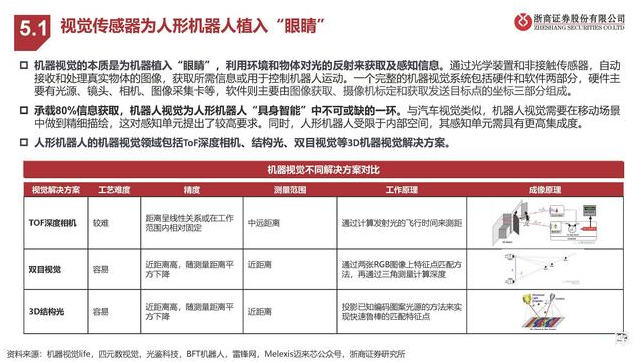
视觉传感器为人形机器人植入“眼睛”
机器视觉的本质是为机器植入“眼睛”,利用环境和物体对光的反射来获取及感知信息。通过光学装置和非接触传感器,自动 接收和处理真实物体的图像,获取所需信息或用于控制机器人运动。一个完整的机器视觉系统包括硬件和软件两部分,硬件主 要有光源、镜头、相机、图像采集卡等,软件则主要由图像获取、摄像机标定和获取发送目标点的坐标三部分组成。承载80%信息获取,机器人视觉为人形机器人“具身智能”中不可或缺的一环。与汽车视觉类似,机器人视觉需要在移动场景 中做到精细描绘,这对感知单元提出了较高要求。同时,人形机器人受限于内部空间,其感知单元需具有更高集成度。人形机器人的机器视觉领域包括ToF深度相机、结构光、双目视觉等3D机器视觉解决方案。
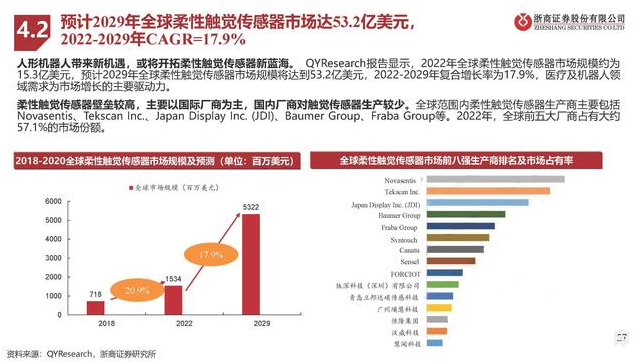
预计2025年全球机器视觉市场将达到1276亿元
全球机器视觉市场规模处于扩张期,机器视觉主要下游应用行业增速明显。虽然机器视觉属于新兴技术,发展时间不长, 但 已经形成了从上到下、多行业领域并行的市场。GGII数据显示,2022年中国机器视觉市场规模约169亿元(该数据未包含自动 化集成设备规模),同比增长22%,预计2025年我国机器视觉市场规模约349亿元。2016-2021年全球机器视觉行业规模销售 收入从417.4亿元上涨至804亿元,预计2025年全球市场规模将达到1276.1亿元,2020年到2025年5年复合增长率约为12%。
5
惯导IMU:人形机器人姿态控制 的核心
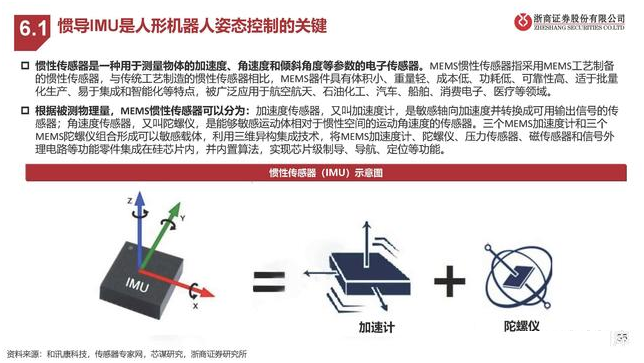
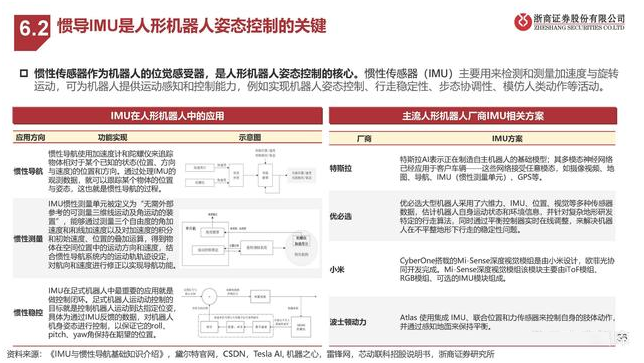
惯导IMU是人形机器人姿态控制的关键
惯性传感器是一种用于测量物体的加速度、角速度和倾斜角度等参数的电子传感器。MEMS惯性传感器指采用MEMS工艺制备 的惯性传感器,与传统工艺制造的惯性传感器相比,MEMS器件具有体积小、重量轻、成本低、功耗低、可靠性高、适于批量 化生产、易于集成和智能化等特点,被广泛应用于航空航天、石油化工、汽车、船舶、消费电子、医疗等领域。
根据被测物理量,MEMS惯性传感器可以分为:加速度传感器,又叫加速度计,是敏感轴向加速度并转换成可用输出信号的传 感器;角速度传感器,又叫陀螺仪,是能够敏感运动体相对于惯性空间的运动角速度的传感器。三个MEMS加速度计和三个 MEMS陀螺仪组合形成可以敏感载体,利用三维异构集成技术,将MEMS加速度计、陀螺仪、压力传感器、磁传感器和信号外 理电路等功能零件集成在硅芯片内,并内置算法,实现芯片级制导、导航、定位等功能。
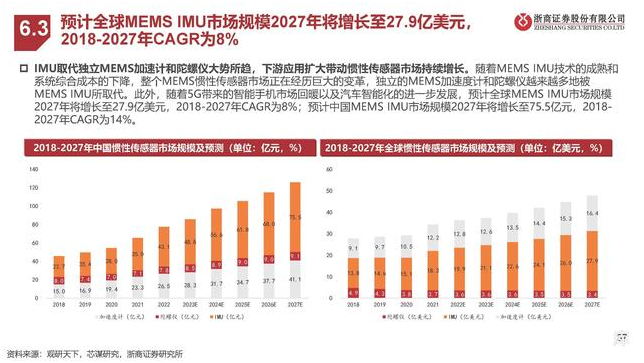
预计全球MEMS IMU市场规模2027年将增长至27.9亿美元, 2018-2027年CAGR为8%
IMU取代独立MEMS加速计和陀螺仪大势所趋,下游应用扩大带动惯性传感器市场持续增长。随着MEMS IMU技术的成熟和 系统综合成本的下降,整个MEMS惯性传感器市场正在经历巨大的变革,独立的MEMS加速度计和陀螺仪越来越多地被 MEMS IMU所取代。此外,随着5G带来的智能手机市场回暖以及汽车智能化的进一步发展,预计全球MEMS IMU市场规模 2027年将增长至27.9亿美元,2018-2027年CAGR为8%;预计中国MEMS IMU市场规模2027年将增长至75.5亿元,2018- 2027年CAGR为14%。















(报告出品方/作者:浙商证券,邱世梁、王华君、姬新悦)
(本文仅供参考,不代表我们的任何投资建议。精选报告来源:【未来智库】。)

✦
+
往期精彩推荐

线上广告合作:17301750044(冯先生)