在无人机自主飞行领域,PX4 是全球普及率最高、生态最完善、拓展性最强的开源飞控系统。它不局限于单一机型控制,而是一套完整的自动驾驶飞行栈,凭借开源免费、稳定可靠、全平台适配的核心优势,成为消费级无人机、工业级无人设备、科研飞行器的核心控制方案,也是无人机开发者、飞手、科研团队的首选底层系统。

一、PX4飞控基础定义
PX4 Autopilot(简称PX4飞控)是基于NuttX实时操作系统开发的开源自动驾驶飞行系统,隶属于Linux基金会旗下的Dronecode开源项目,全程开源、免费、可商用,无版权限制。
区别于传统封闭式飞控,PX4不是单纯的硬件控制器,而是软件定义飞行的完整技术栈,涵盖传感器解析、姿态解算、导航控制、飞行调度、安全防护、外设通信等全流程功能,可搭配各类飞控硬件使用,是无人设备实现自主飞行的核心大脑。

二、PX4核心架构(分层模块化设计)
PX4采用四层分层模块化架构,结构清晰、耦合度低,每个模块独立运行、互不干扰,便于调试、修改和二次开发,也是其稳定性与扩展性的核心根源。
1. 驱动层(硬件底层)
最底层硬件适配接口,负责对接各类硬件外设,包括IMU惯性传感器、GPS定位模块、气压计、磁力计、陀螺仪、电机电调、舵机、云台、激光雷达、视觉相机等,支持市面上绝大多数主流无人机硬件配件,兼容性极强。
2. 核心算法层(控制核心)
系统的运算中枢,搭载PX4自研的高精度控制算法与状态估计算法:
- 姿态/位置控制:实现无人机横滚、俯仰、偏航姿态稳定,完成高度、定点、航线精准控制;
- EKF2/EKF3扩展卡尔曼滤波:融合多传感器数据,过滤飞行噪声、修正定位误差,解决GPS漂移、姿态抖动问题,保障复杂环境飞行稳定性;
- 多级闭环控制逻辑:从角速率控制、姿态控制、速度控制到位置控制,层层迭代,飞行精度远高于普通开源飞控。
3. 框架层(通信与调度中枢)
核心核心为uORB微对象消息总线,是PX4的“信息通道”。所有功能模块通过uORB实现异步通信,独立收发数据,避免模块冲突,同时集成参数管理、日志记录、故障诊断、系统调度功能,保障飞行数据实时传输、可追溯、可调试。
4. 应用层(飞行功能与任务)
面向用户和开发者的功能层,集成丰富的飞行模式、自主任务逻辑、安全策略。支持手动操控、半自动、全自动飞行,可自定义航线、定点悬停、自主起降、返航、绕点飞行、任务巡检等功能,适配各类自主飞行场景。
三、PX4飞控核心优势
1. 全机型通用适配
PX4是极少数覆盖全品类无人设备的飞控系统,不局限于多旋翼无人机,同时完美适配固定翼、垂直起降VTOL、无人直升机、履带机器人、水下ROV等无人平台。
2. 完整配套生态
官方配套 QGroundControl(QGC地面站)
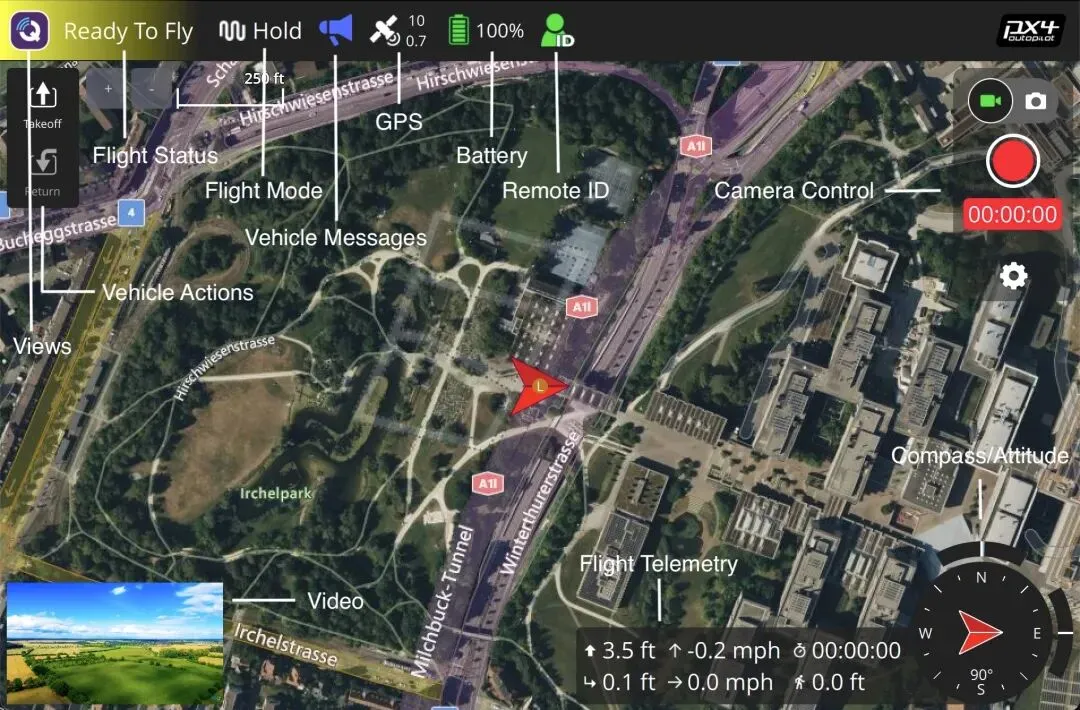
可实现固件刷写、参数调试、航线规划、实时图传、飞行日志下载。同时兼容MAVSDK、ROS2,支持电脑、安卓平板远程控制,二次开发接口完善。
3. 开源商用友好
代码托管于GitHub,允许企业修改、闭源衍生产品用于商业项目,只需遵守开源协议;全球大量工程师持续维护更新,BUG修复速度快。
4. 强大安全机制
失控保护、地理围栏、低电量返航、故障冗余(双IMU、双GPS支持)、故障分离检测,适合工业巡检、测绘等高价值作业场景。
四、典型应用场景
1. 航测测绘无人机(VTOL垂起固定翼)
2. 安防巡检多旋翼无人机
3. 科研视觉导航、集群无人机项目
4. 自主无人船、水下机器人
5. 教育教学无人机开发平台
五、总结
PX4不只是一块飞控硬件,而是一套完整自主飞行解决方案。对于爱好者,可以低成本搭建无人机;对于企业,可以基于底层代码快速开发定制化无人系统;对于科研人员,开放的算法源码是研究自主导航、机器视觉最好的试验平台。
如今全球无数工业无人机厂商、高校实验室都在基于PX4持续创新,它也奠定了现代开源自主飞行技术的基石。
