

一、核心结构与工作原理
谐波减速传动装置与传统的齿轮传动装置截然不同,因为其工作原理并非基于刚性啮合齿轮。相反,这种传动装置利用薄壁齿轮的弹性变形,以实现高减速比、紧凑结构和几乎无间隙的动力传输。
谐波减速装置的核心由三个功能协调的部件组成:波发生器、柔轮和刚轮。波发生器通常与驱动轴相连,由一个椭圆形凸轮组成,该凸轮通过薄壁轴承使柔轮变形。柔轮是一个圆柱形的弹性齿轮,其齿数略少于周围的刚轮。
波发生器的旋转使柔轮持续发生椭圆形变形。这种变形使柔轮与刚轮的相对齿轮啮合。此时,两个齿轮的不同齿数至关重要:波发生器每转一圈,啮合点就会移动几个齿。这导致柔轮相对于刚轮产生缓慢的相对运动,从而实现所需的减速比。
谐波减速机运行原理示意图
该原理的独特优势在于,仅需一个传动级即可实现高减速比。同时,柔轮的弹性预紧力确保齿轮啮合几乎无间隙。对用户而言,这意味着运动精确、结构紧凑且重复精度极高,特别适用于频繁改变方向且对控制精度要求较高的应用场合。
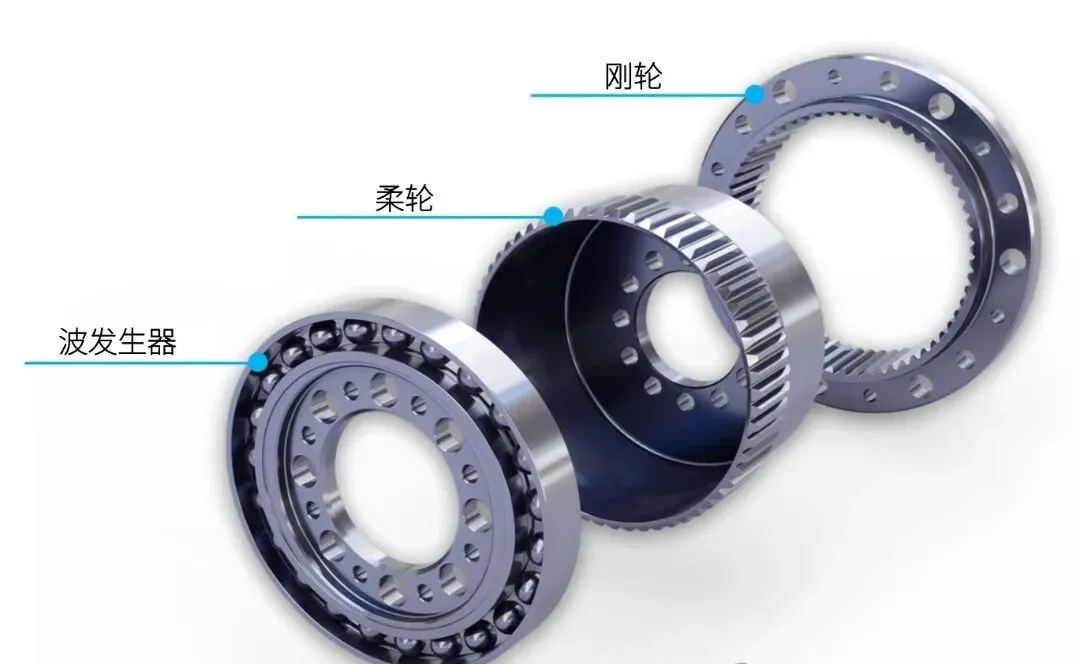
谐波减速机的构成
二、主流应用场景
谐波减速机结构非常紧凑,可实现高精度的运动传递。它可用于需要不仅传递旋转运动,而且还需要精确控制和可重复定位的任何场合。其主要目的是实现几乎无间隙的扭矩传递。通过柔轮的弹性变形,多个齿对同时啮合,从而基本消除了齿侧间隙。这使得即使在频繁改变方向的情况下,也能实现高重复精度和稳定的调节性能。
同时,仅在一个传动级就能实现非常高的减速比。减速比源于柔轮和刚轮之间的齿差较小。此外,通过许多齿均匀分配负载,可以在相对较小的尺寸下实现高扭矩。
谐波减速机在机器人轴中的应用
三、技术溯源:发明者与发展历程
谐波减速机的工作原理可追溯到美国工程师克拉伦斯·沃尔顿·穆瑟。他于1957年在专利申请(美国专利2,906,143——“谐波减速机”)中首次描述了弹性齿轮啮合的概念。
20世纪60年代,该技术首先在航空航天领域得到工业应用,因为其紧凑的设计、无间隙的传动装置和高精度提供了决定性的优势。随着材料、齿轮几何形状和制造技术的不断发展,从20世纪70年代开始,谐波减速机在工业自动化和机器人领域得到了越来越广泛的应用。
四、性能优势与现存短板
谐波减速机的主要优点是几乎无间隙的扭矩传输。弹性齿轮使方向转换时的反向间隙最小(通常小于1角分),从而实现了高定位精度和重复精度。因此,该传动装置特别适用于精密、可调节的驱动系统。
另一个优点是仅一个传动级就能实现高减速比。因此,可以实现非常紧凑的驱动解决方案,同时具有高扭矩密度。通过许多同时承载的齿进行动力传输,还确保了平稳运行,并减少了局部峰值负荷。
然而,由于柔轮的弹性变形,其抗扭刚度有限,在动态应用中必须考虑这一点。由于部分动力用于循环变形,其效率也低于经典齿轮传动装置。其他限制包括冲击和过载能力以及有限的持续转速。因此,对于高动态或强冲击负荷的应用,其他传动装置更适合。
五、技术迭代与未来发展前景
谐波减速机在人形机器人中起着关键作用。特别是在手臂、手和腿的轴上,高定位精度、紧凑的设计和低扭矩间隙对于精确、可重复地模仿人类动作至关重要。谐波减速机特别适用于高减速比的关节,在这些关节中,电机、传感器和传动装置紧密集成,需要稳定的控制性能。

带关节驱动装置的人形机器人
技术发展侧重于延长柔轮的使用寿命、提高刚度,并使其更适合人形机器人运动过程中出现的动态负载变化。因此,谐波减速机仍然是人形机器人系统中精确、紧凑的关节驱动装置的关键技术。
End
来源:埃马克中国
编辑:李菁
责任编辑:赵敏
审核人:刘世博
