报告 《中国人工智能系列白皮书-具身智能(2026 版)》(附下载)
2026-05-06 09:05
报告 《中国人工智能系列白皮书-具身智能(2026 版)》(附下载)
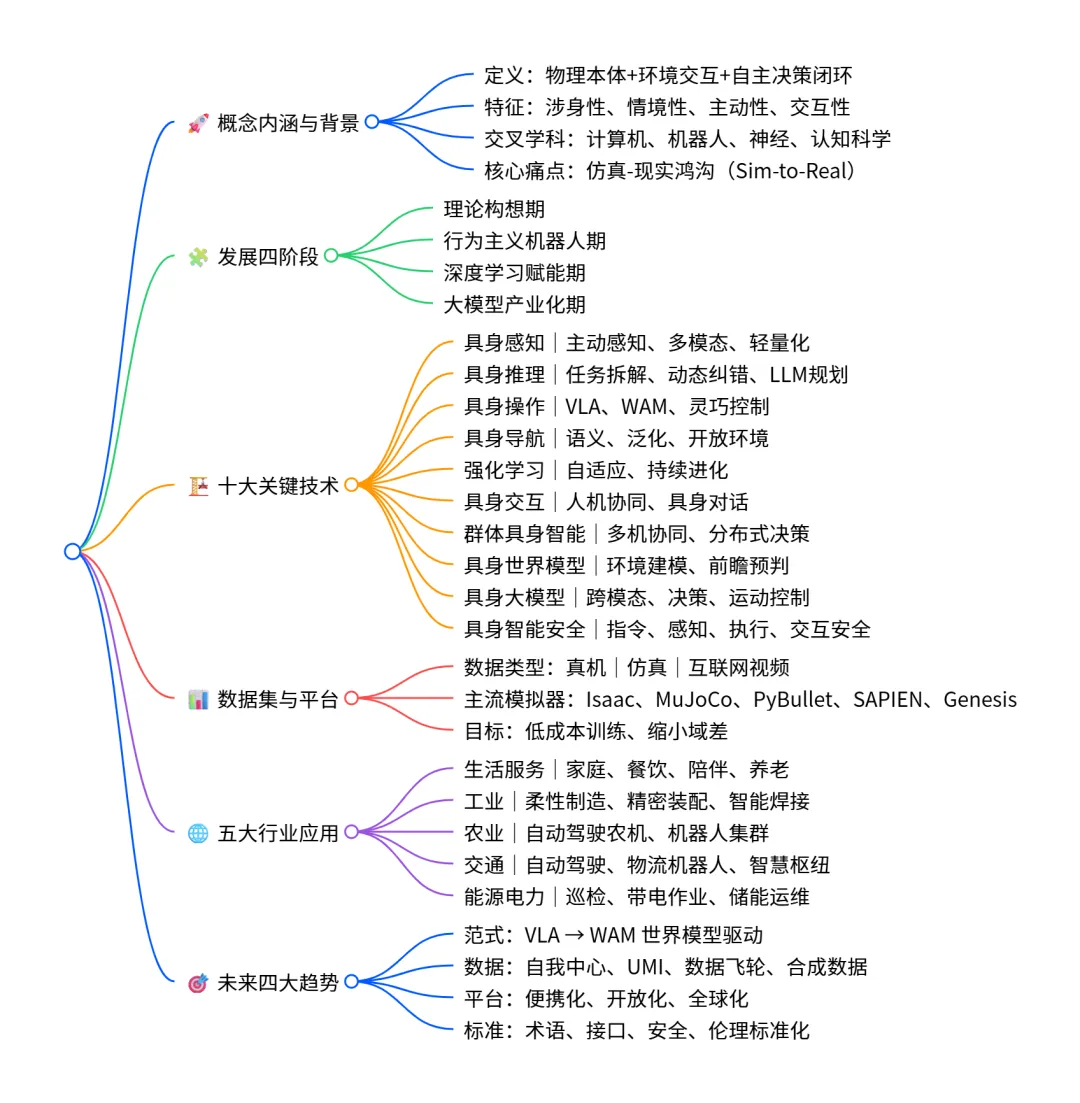
大家好,这里是「 IT运维砖家 」全新专栏— 前沿洞察 。 定期梳理行业相关白皮书、蓝皮书、行业研究报告等,站在网工、数通、IT运维视角,一起了解技术前沿,跳出传统网络运维固有局限 ,掌握行业顶层技术趋势, 持续拓宽技术视野 。今天为大家带来《中国人工智能系列白皮书—具身智能(2026 版)》,文末附报告下载链接。本白皮书由 中国人工智能学会 编制,系统阐述具身智能的 概念内涵、发展历程、关键技术、数据集与平台、行业应用及未来趋势 ,围绕 感知 — 认知 — 决策 — 行动 闭环体系,梳理技术路线、明确应用方向、推进标准建设,为我国具身智能技术创新与产业落地提供权威指引。- 具身智能:AI 从虚拟走向物理实体,形成 感知 — 认知 — 决策 — 行动 闭环
- 多学科交叉:计算机、机器人、神经科学、认知科学融合
- 核心目标:弥合 仿真 — 现实鸿沟(Sim-to-Real)
- 具身感知:主动感知、多模态融合、轻量化、动态自适应
- 具身操作:VLA 模型、WAM 世界动作模型、灵巧控制
- 具身智能安全:指令劫持、越狱攻击、传感器安全、人机安全
- 主流模拟器:NVIDIA Isaac、MuJoCo、PyBullet、SAPIEN、Genesis
- 能源电力:巡检机器人、带电作业、储能运维、无人值守
- 技术: VLA → WAM 范式跃迁,世界模型成为核心
- 数据:自我中心感知、UMI 通用接口、数据飞轮、合成数据爆发
八、 网工运维启示
- 具身智能 =物理世界的自主执行体,必须按关键基础设施管控
- 网络需满足低时延、高可靠、大连接,支撑机器人实时交互与协同
- 算网一体要求:边缘算力 + 云端大模型协同,降低端侧压力与卡顿
- 多模态传感器(视觉 / 激光 / 触觉)大量上云,带来带宽与稳定性新刚需
- 安全升级:指令可信、权限可控、行为可溯,必须全链路留痕
- 设备边界需强化:访问控制、边界隔离、异常监测,防横向渗透与越权
- 运维模式转向:自动化巡检→机器人代劳→智能体自治,人机协同成常态
- 行业网络走向场景化、确定性、高鲁棒,适配工业/农业/电力特种场景
声明:本文是对《 中国人工智能系列白皮书—具身智能(2026 版)》的整理与提炼,报告完整版权归 中国人工智能学会 所有,本公众号通过公开渠道获取,如有侵权请联系删除更正。? 如需获取《 中国人工智能系列白皮书—具身智能(2026 版)》,发送关键词“ 具身智能 ”获取链接指引。? 欢迎扫码加入, 「IT运维砖家」知识星球, 获取更多硬核资料。感谢关注「 IT运维砖家 」【前沿洞察】专栏, 定期梳理最新白皮书、蓝皮书等 ,覆盖算力、通信、人工智能、网络安全、低空通信、 云网融合等领域。为网工、数通、IT运维人提供 专业、前沿、接地气 的行业前沿发展趋势 。