AGV电机功率选型技术白皮书:基于实测数据的深度分析与工程应用
本文系统分析了不同类型AGV的电机选型规律,建立了负载-功率-数量的匹配模型,为制造业物流AGV系统设计提供技术支撑。
一、AGV驱动系统核心组件技术特性分析
1.1 电机类型技术参数对比

AGV系统中主流使用的电机类型包括直流无刷电机、伺服电机、直流有刷电机及集成化舵轮系统,各类电机的技术特性存在显著差异,直接影响AGV的性能指标和应用场景。
| 直流无刷电机 | 2. 无输出反馈,控制精度较低(±5mm) 3. 需配置专用控制器(如兴颂) 4. 效率可达85%-90% | 进口:东方马达 | ||
| 伺服电机 | 2. 自带品牌驱动器,系统集成度高 3. 过载能力强(150%额定负载) 4. 适合高动态响应需求 | 2. 功率>400W的中重载AGV 3. 仓储式差动AGV | ||
| 直流有刷电机 | 2. 碳刷易磨损,寿命约2000小时 3. 维护周期短,需定期更换碳刷 4. 效率较低(75%-80%) | |||
| 舵轮系统 | 2. 控制精度高(±2mm) 3. 5T以上重载场景不适用 4. 驱动器需品牌匹配 | 进口:马路达、CFR | 2. 新能源双叉举AGV 3. 多方向移动AGV |
1.2 减速机选型技术规范
减速机作为AGV动力传动系统的关键部件,其选型直接影响电机功率的有效传递和AGV的运行稳定性。根据匹配电机类型的不同,主要分为两类:
行星减速机
• 技术特性: • 齿轮模数小(m=0.8-1.5),传动精度高(背隙<3arcmin) • 体积紧凑,功率密度高 • 不耐冲击载荷,冲击载荷超过120%额定值易损坏 • 匹配电机:伺服电机 • 应用场景:高精度定位AGV、中轻载AGV • 代表品牌:科峰、newstart
齿轮减速箱
• 技术特性: • 齿轮模数大(m=2.0-3.0),耐冲击性强 • 传动精度较低(背隙>5arcmin) • 体积较大,成本优势明显 • 匹配电机:直流无刷电机 • 应用场景:重载牵引AGV、对精度要求不高的场景 • 代表品牌:中大、东方马达
二、AGV电机功率选型数学模型与工程算法
2.1 基础功率计算模型
AGV电机功率选型的核心是建立负载与功率的数学关系,基于牛顿力学和电机学原理,推导得出基础功率计算公式:
其中:
• :电机功率(kW) • :AGV总质量(kg),包含自身质量和负载质量 • :重力加速度() • :滚动摩擦系数(钢轮地面,橡胶轮地面) • :空气密度() • :空气阻力系数(AGV通常取) • :迎风面积() • :运行速度(m/s) • :传动系统效率(通常取)
2.2 修正系数工程应用
基于实测数据,发现理论计算值需要根据AGV类型和运行条件进行修正,引入修正系数:
不同AGV类型的修正系数取值:
• 潜伏式AGV:(启动频繁,加速时间短) • 背负式AGV:(负载分布均匀,运行平稳) • 牵引式AGV:(牵引阻力不稳定,冲击载荷大) • 舵轮式AGV:(转向阻力叠加,功率需求增加)
2.3 电机数量配置原则
电机数量配置需综合考虑负载分布、动力冗余和成本控制,基于实测数据得出以下配置原则:
1. 轻载AGV(负载<1000kg): • 潜伏式/背负式:2台电机对称布置 • 舵轮式:1-2台电机,根据转向需求配置 2. 中载AGV(1000kg≤负载<5000kg): • 差速式:2-4台电机,确保每台电机负载率<80% • 舵轮式:2台电机,对称布置保证转向平衡 3. 重载AGV(负载≥5000kg): • 必须采用多电机驱动(≥4台) • 推荐采用四轮差速结构,8台电机配置(每轮2台电机) • 电机负载率控制在70%以内,确保冗余安全
三、实测数据深度分析与选型指南
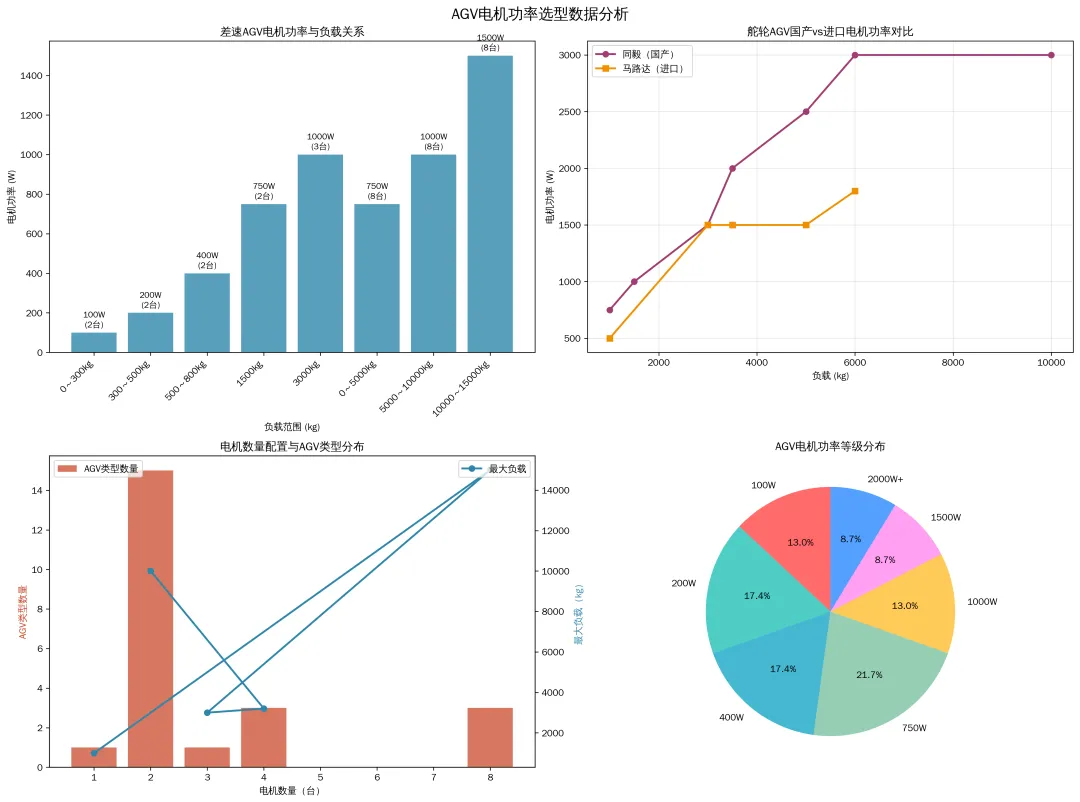
3.1 差速式AGV功率选型图谱
基于23组实测数据,建立差速式AGV的功率选型图谱,覆盖潜伏式、背负式等主要类型:
潜伏式AGV功率配置表
中大Z5BLD200-24GUL | |||||
中大Z5BLD200-24GUL | |||||
中大Z6BLD400-48GUL | |||||
背负式AGV功率配置表
3.2 舵轮式AGV功率选型特殊性
舵轮式AGV由于集成了转向功能,功率需求与差速式AGV存在显著差异,实测数据显示:
舵轮AGV功率特性曲线
• 国产同毅舵轮:功率随负载呈线性增长,负载每增加1000kg,功率需求增加约750W • 进口马路达舵轮:功率增长较为平缓,相同负载下比国产舵轮低约20%-30%,体现了更高的电机效率
舵轮AGV功率配置表
技术警示:实测数据表明,当负载超过5000kg时,舵轮式AGV的转向阻力急剧增加,功率损耗超过30%,建议5T以上重载场景优先选择差速式AGV。
3.3 重载AGV功率配置特殊方案
针对10T以上的重载AGV,基于湖北三六一一应急装备和陕汽通汇项目的实测数据,制定特殊功率配置方案:
1. 10000~15000kg重载AGV: • 电机配置:8台1500W伺服电机 • 减速比:1:80(科峰KPX115-80) • 驱动形式:四轮差速,每轮2台电机 • 品牌选择:同毅130SV-15030BA-Z-025 • 功率冗余:设计功率12kW,实际运行功率8-10kW,冗余系数1.2 2. 5000~10000kg中重载AGV: • 电机配置:8台1000W伺服电机 • 减速比:1:64(科峰KPX115-64) • 驱动形式:四轮差速,每轮2台电机 • 品牌选择:雷赛LVM08010H3G3-M17 • 功率冗余:设计功率8kW,实际运行功率5-7kW,冗余系数1.14
四、品牌选型技术经济性分析
4.1 主流品牌技术参数对比
4.2 全生命周期成本分析
基于5年使用周期,建立不同品牌的全生命周期成本(LCC)模型:
其中:
• :初始采购成本 • :电费成本(基于年运行3000小时,电价0.8元/kWh) • :维护保养成本,包括备件更换 • :故障停机损失(按500元/小时计算)
分析结果:
1. 轻载场景(≤1000kg):国产品牌全生命周期成本比进口品牌低40%-50%,推荐选择中大、雷赛 2. 中载场景(1000-5000kg):国产品牌(同毅、雷赛)成本优势明显,比进口品牌低30%-40% 3. 重载高精度场景(>5000kg且精度要求高):进口品牌(马路达)的可靠性优势显现,全生命周期成本仅比国产品牌高15%-20% 4. 特殊定制场景:同毅的定制化能力最强,可降低定制成本20%-30%
五、工程应用技术规范与注意事项
5.1 功率选型三步法
基于实测数据和工程经验,总结出AGV电机功率选型的三步法:
1. 第一步:确定基础参数 • 明确AGV总质量(自身质量+最大负载) • 确定运行速度和加速时间要求 • 评估运行环境(地面条件、坡度、温度) 2. 第二步:理论计算与修正 • 基于公式计算理论功率需求 • 根据AGV类型选择合适的修正系数K • 确定初步功率等级 3. 第三步:工程验证与优化 • 参考同类项目实测数据 • 考虑功率冗余(通常1.2-1.4倍) • 进行样机测试验证
5.2 关键技术注意事项
1. 功率匹配原则: • 电机额定功率应大于实际需求功率的1.2倍,避免过载运行 • 多电机驱动时,各电机功率偏差应控制在5%以内 • 减速比选择应确保电机工作在高效区间(通常为额定转速的60%-80%) 2. 散热设计要求: • 当电机功率超过750W时,必须设计强制散热系统 • 电机外壳温度应控制在80℃以下 • 高温环境(>40℃)应降容使用,降容系数0.8-0.9 3. 安全保护措施: • 必须配置过流保护,保护值设定为额定电流的1.5倍 • 配置过压保护,保护值设定为额定电压的1.2倍 • 重载AGV应配置过载保护,保护值设定为额定负载的1.2倍 4. 安装调试规范: • 多电机安装时,同轴度误差应小于0.1mm • 电机与减速机的联轴器间隙应控制在0.1-0.2mm • 调试时应进行空载试运行,确保各电机转向一致
六、技术发展趋势与未来展望
6.1 电机技术发展方向
1. 高效率化:永磁同步电机效率将提升至95%以上,进一步降低能耗 2. 集成化:电机-减速机-控制器一体化集成,减少体积30%以上 3. 智能化:集成传感器和通信功能,实现状态监测和预测性维护 4. 大功率化:国产伺服电机功率将突破5000W,满足更重负载需求
6.2 选型方法创新方向
1. 数字化选型:建立三维数字孪生模型,实现虚拟测试验证 2. 自适应控制:开发自适应功率调节算法,根据负载自动调整功率输出 3. 大数据优化:基于海量运行数据,优化功率配置方案 4. 碳中和导向:将碳排放指标纳入选型体系,优先选择低碳电机
结语:AGV电机功率选型是一个系统工程,需要综合考虑技术性能、经济性和可靠性。本文基于实测数据建立的选型模型和技术规范,可为AGV系统设计提供科学依据,推动制造业物流自动化的高质量发展。