
导言:
灵巧手是机器人实现人性化精细操作的终极钥匙,正从实验室迈向广阔的工业与服务市场。2025 年人形机器人量产元年开启,灵巧手作为核心部件需求爆发。本简报将剖析这一尖端领域的技术难点、竞争格局与百亿级市场前景,为把握具身智能的投资浪潮提供关键坐标。


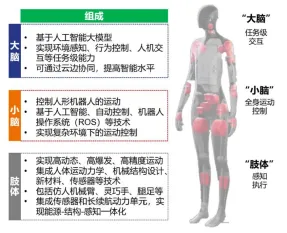
一、行业概述:机器人皇冠上的明珠

二、发展历程




三、监管政策


四、行业现状与市场规模


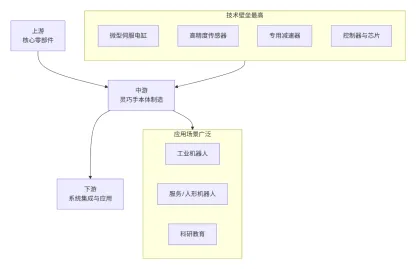
五、产业链分析


六、市场竞争格局





七、发展趋势


导言:
灵巧手是机器人实现人性化精细操作的终极钥匙,正从实验室迈向广阔的工业与服务市场。2025 年人形机器人量产元年开启,灵巧手作为核心部件需求爆发。本简报将剖析这一尖端领域的技术难点、竞争格局与百亿级市场前景,为把握具身智能的投资浪潮提供关键坐标。
一、行业概述:机器人皇冠上的明珠
二、发展历程
三、监管政策
四、行业现状与市场规模
五、产业链分析
六、市场竞争格局
七、发展趋势