NeurIPS‘25 Spotlight 自动驾驶的最新工作
2025-11-08 09:02
NeurIPS‘25 Spotlight 自动驾驶的最新工作
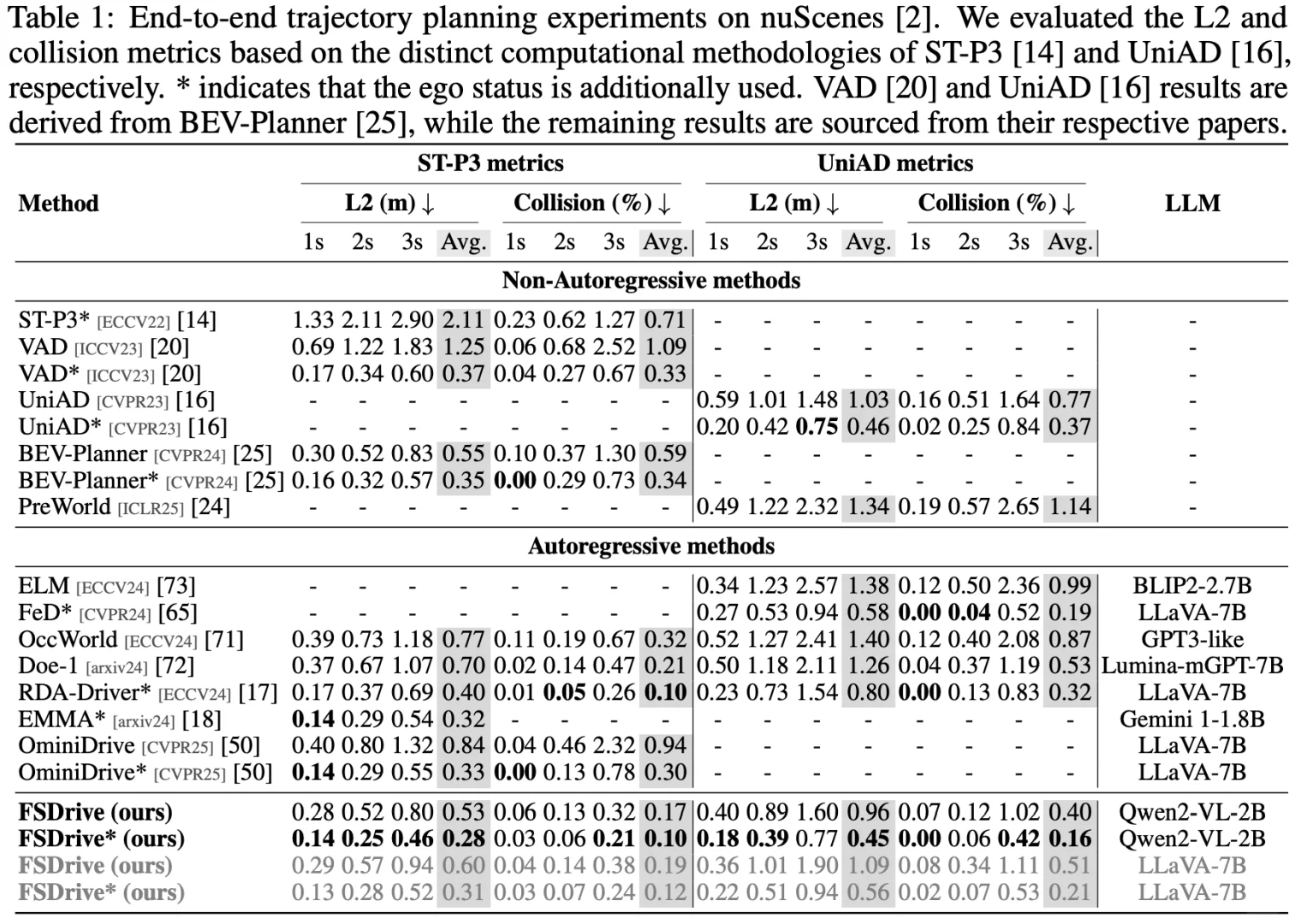
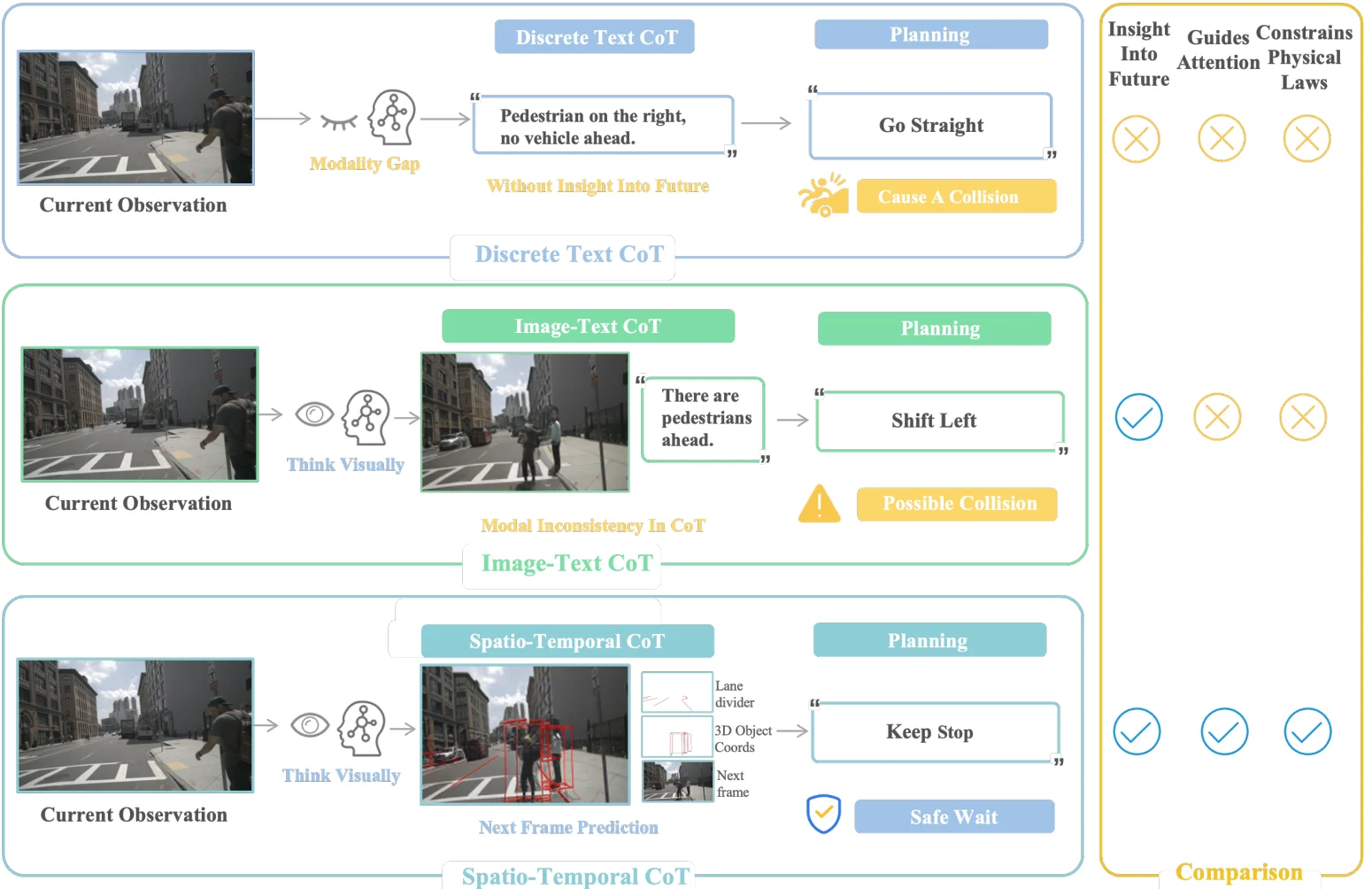
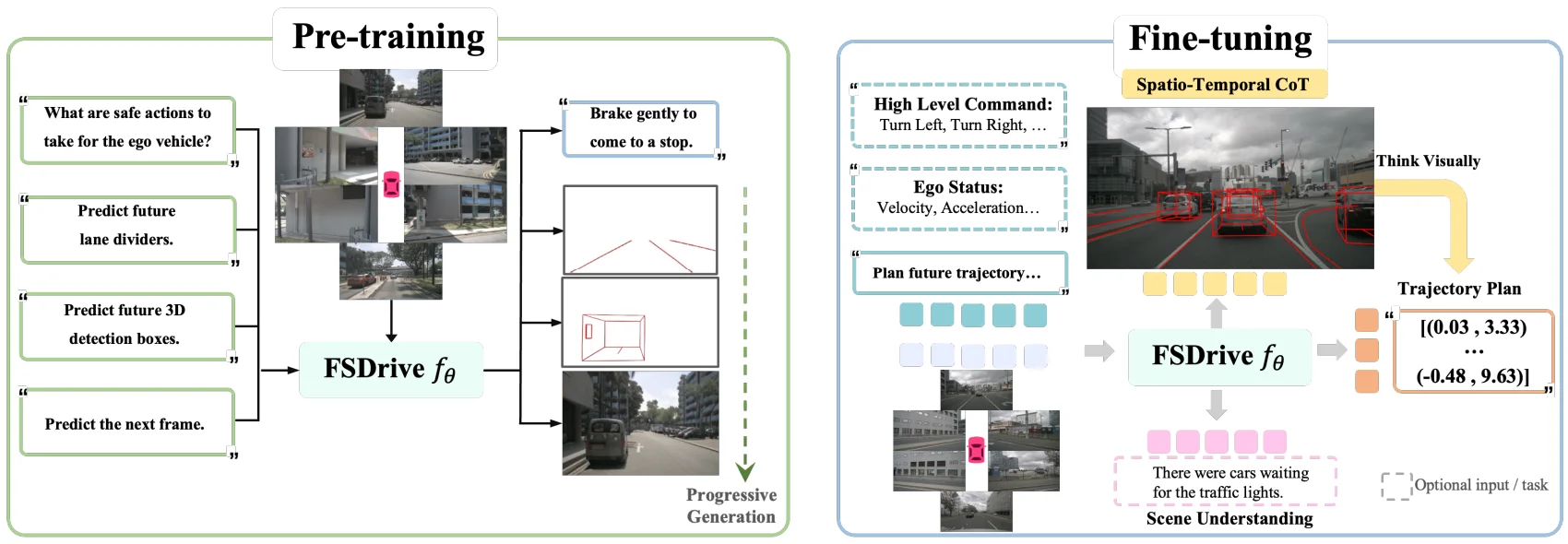
?FutureSightDrive: 扩展原生多模态大模型,以自回归的形式统一 VLA 和世界模型。提出的时空CoT让端到端自动驾驶VLA可视化地思考轨迹规划的,推动自动驾驶迈向视觉推理。
?论文地址:https://arxiv.org/abs/2505.17685
?代码地址:https://github.com/MIV-XJTU/FSDrive
#自动驾驶 #具身智能 #VLA #自动驾驶技术