




❤️点点关注,每日更新50篇论文,不错过任何科研进展!
————————————————————
❓这项论文主要研究了什么问题?
Haochuan Xu, Yun Sing Koh等人针对Vision-Language-Action (VLA)模型在机器人学习中的对抗鲁棒性提出了全新研究。VLA模型能够让机器人根据自然语言指令完成复杂的物理任务,虽然取得了巨大进步,但其在面对对抗性攻击时的防护能力却鲜有深入探讨。
❓论文提出了什么新方法?
研究团队来自奥克兰大学(The University of Auckland)和沙特阿卜杜拉国王科技大学(King Abdullah University of Science and Technology)。他们提出了Embedding Disruption Patch Attack(EDPA),这是一种模型无关的对抗性补丁攻击方法。不同于以往需要对模型结构或控制机械臂有详细了解的攻击方式,EDPA只需访问VLA模型的编码器参数即可生成攻击补丁。这些补丁通过破坏视觉与文本潜在表示之间的语义对齐,并最大化干净输入与对抗输入之间的表征差异,从而让机器人模型产生错误动作,导致任务失败。
❓EDPA的创新点和实验表现如何?
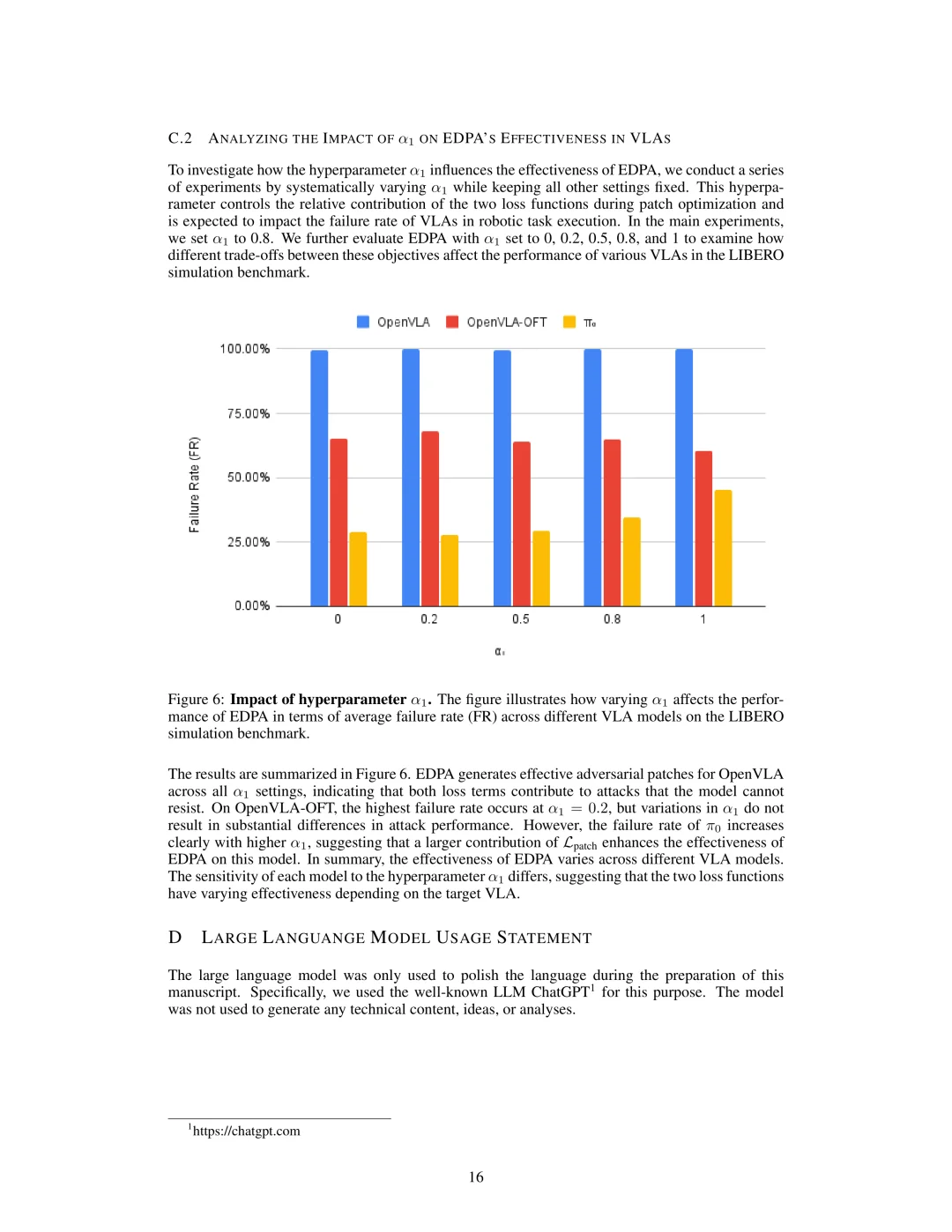
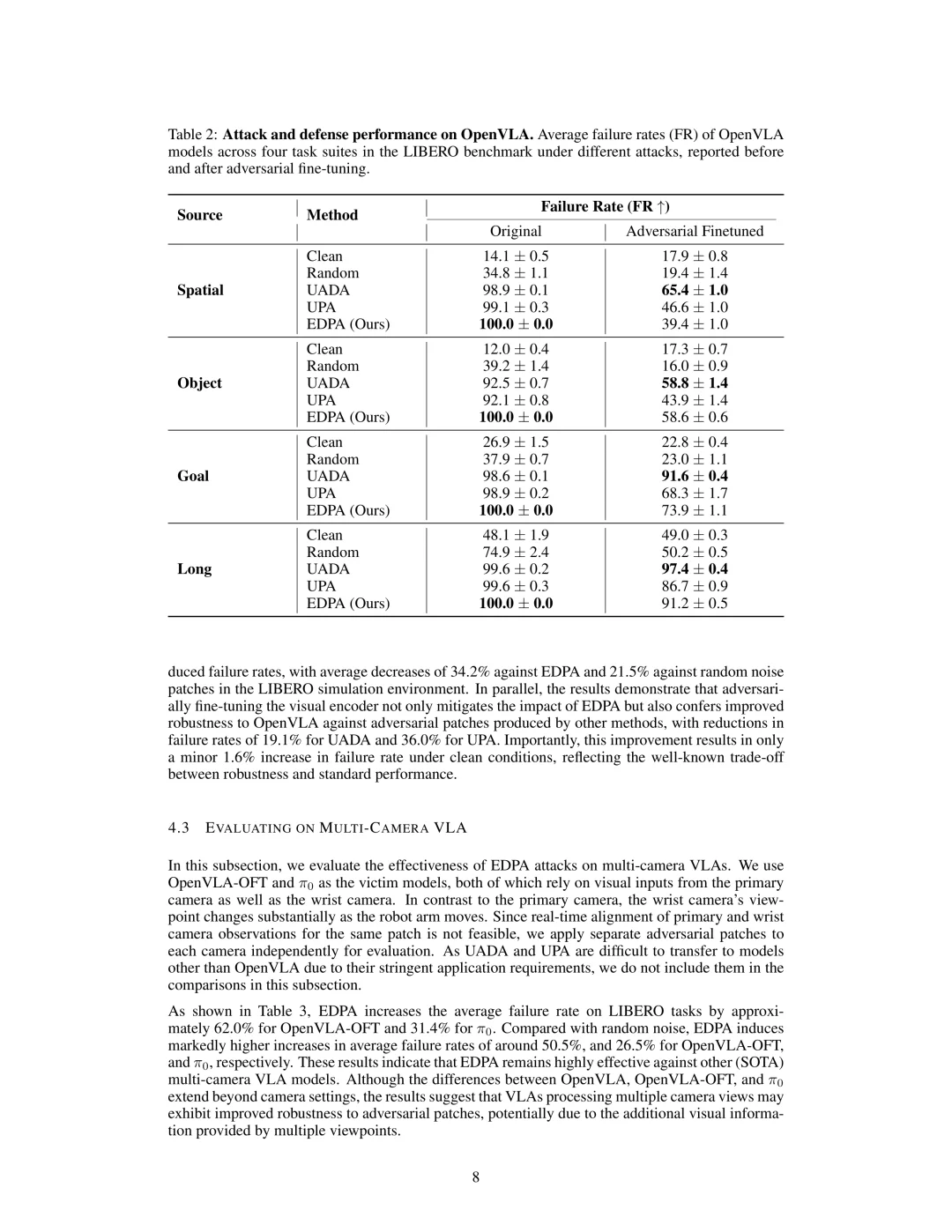
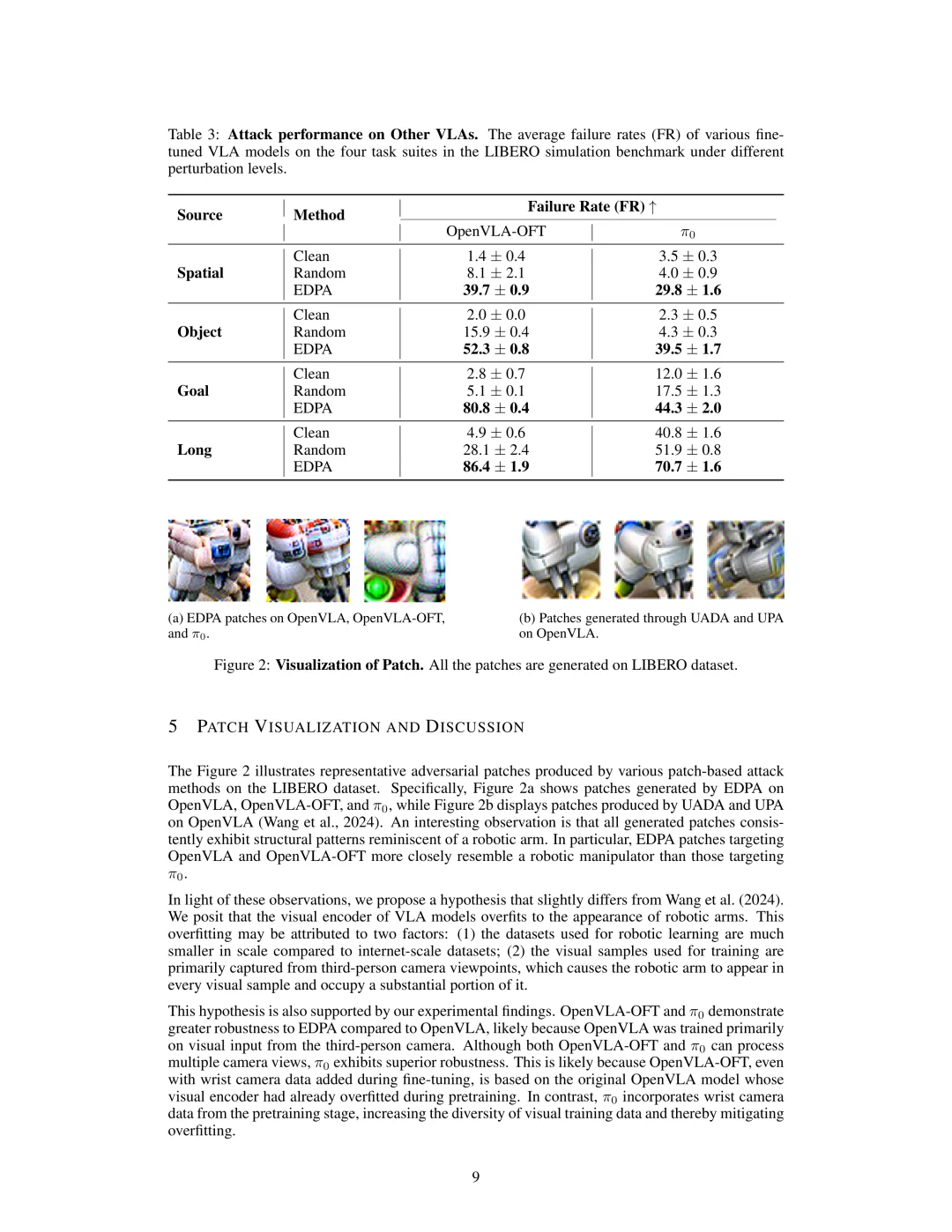
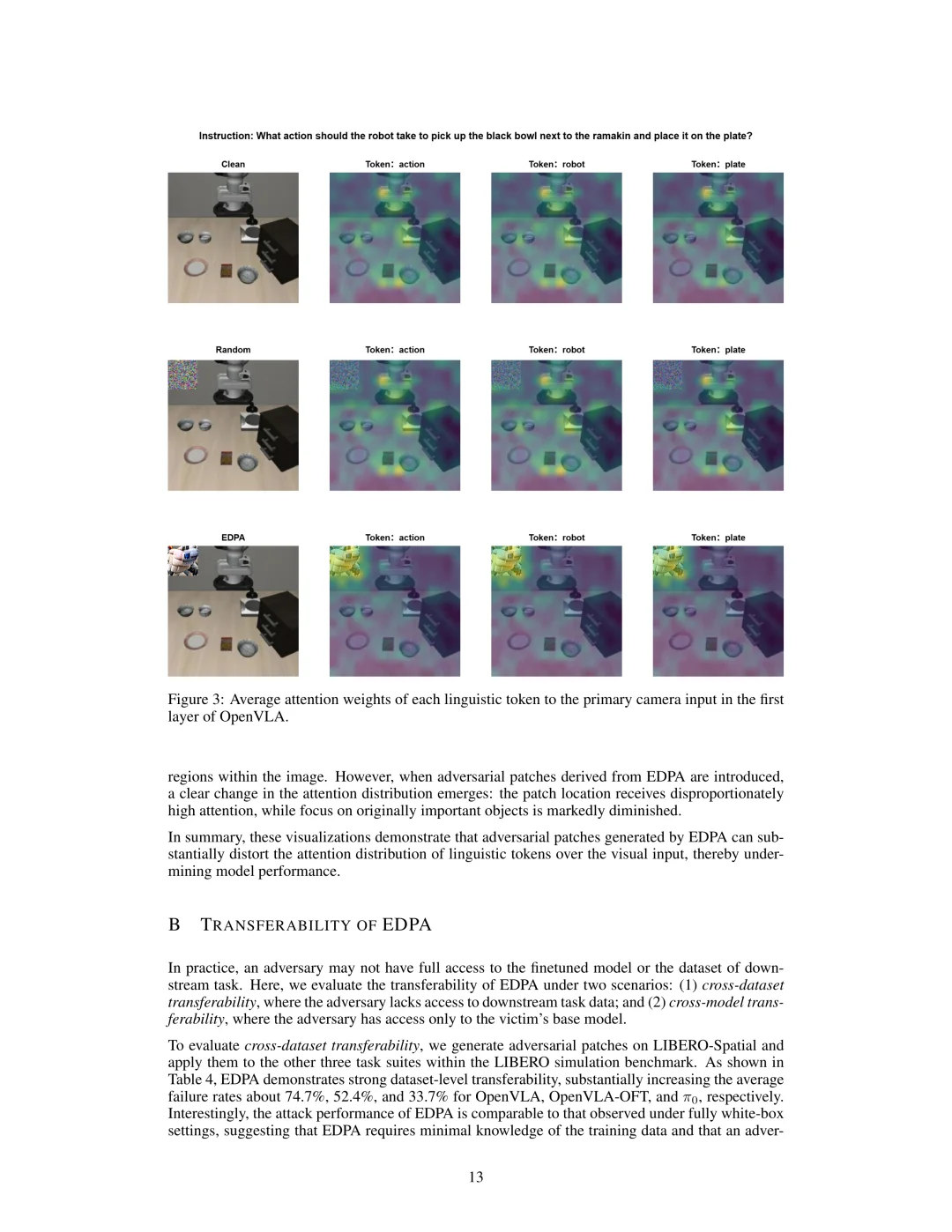
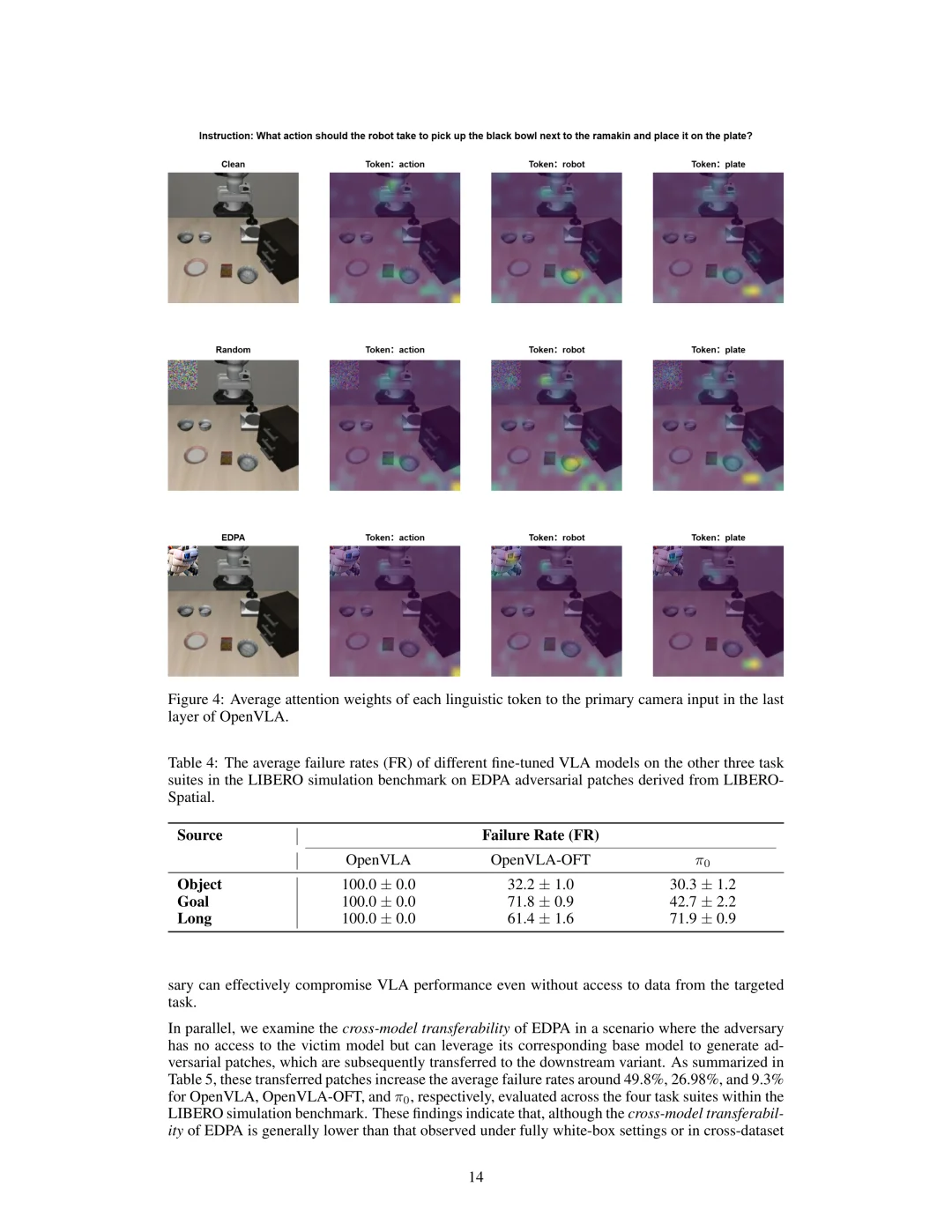
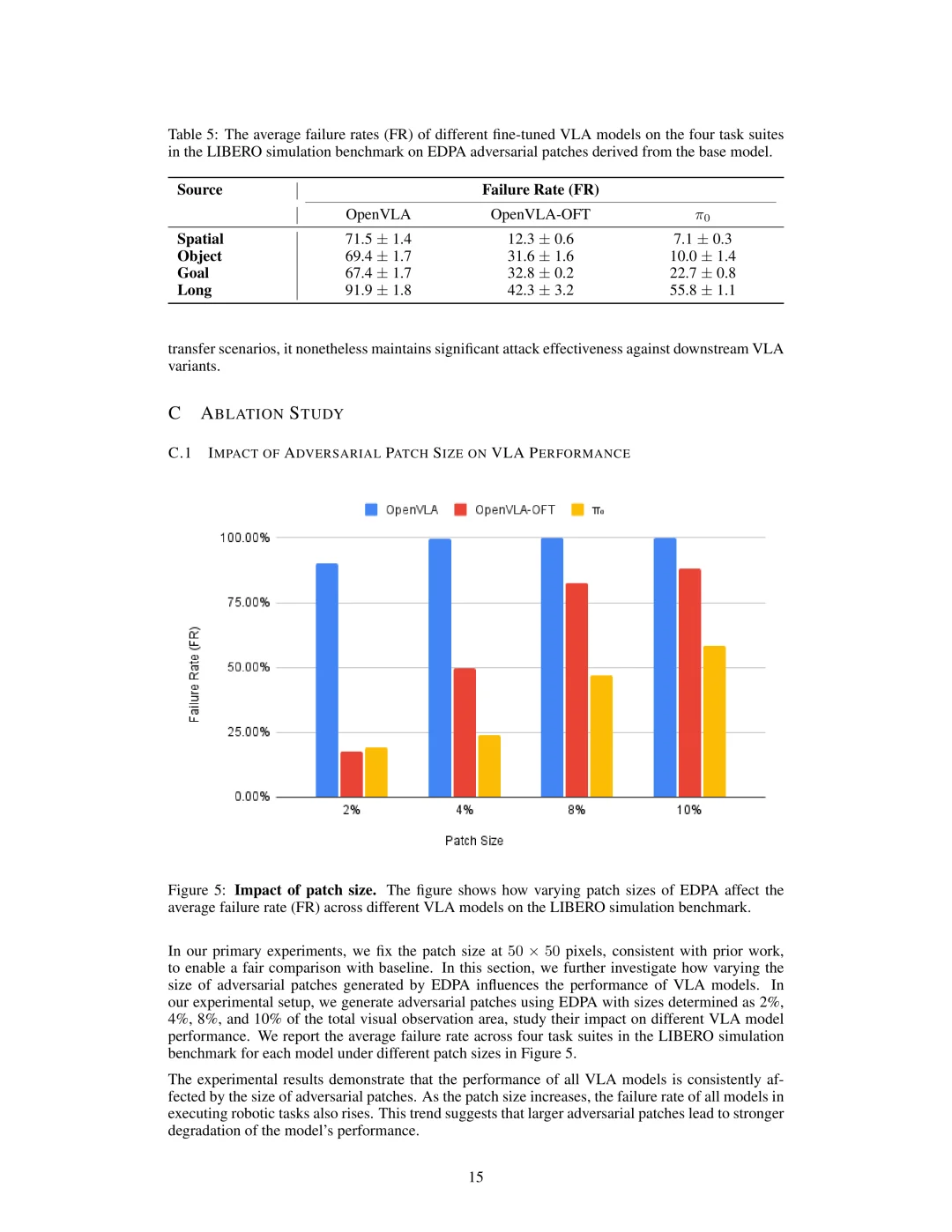
EDPA最大的特点在于通用性强,可以应用于不同的VLA模型,无需了解模型内部架构。实验在LIBERO机器人仿真基准上进行了广泛评估,结果显示,EDPA能显著提升主流VLA模型的任务失败率。例如,在OpenVLA模型上,EDPA让任务失败率平均提升了74.7%,远高于随机噪声补丁和其他现有攻击方法。
❓论文还提出了怎样的防御策略?
针对EDPA带来的威胁,作者还提出了一种视觉编码器的对抗性微调方案。具体做法是利用EDPA生成的对抗补丁对视觉编码器进行微调,促使其在干净和被攻击输入下都能输出相似的潜在表示。实验结果显示,经过对抗微调的模型在面对EDPA和其他补丁攻击时,失败率大幅下降,同时在无攻击时的性能仅有微小损失,实现了鲁棒性与性能的平衡。
arXiv: 2510.13237v1#机器人学习 #对抗攻击 #模型安全 #奥克兰 #果壳智算
————————————————————
❓这项论文主要研究了什么问题?
Haochuan Xu, Yun Sing Koh等人针对Vision-Language-Action (VLA)模型在机器人学习中的对抗鲁棒性提出了全新研究。VLA模型能够让机器人根据自然语言指令完成复杂的物理任务,虽然取得了巨大进步,但其在面对对抗性攻击时的防护能力却鲜有深入探讨。
❓论文提出了什么新方法?
研究团队来自奥克兰大学(The University of Auckland)和沙特阿卜杜拉国王科技大学(King Abdullah University of Science and Technology)。他们提出了Embedding Disruption Patch Attack(EDPA),这是一种模型无关的对抗性补丁攻击方法。不同于以往需要对模型结构或控制机械臂有详细了解的攻击方式,EDPA只需访问VLA模型的编码器参数即可生成攻击补丁。这些补丁通过破坏视觉与文本潜在表示之间的语义对齐,并最大化干净输入与对抗输入之间的表征差异,从而让机器人模型产生错误动作,导致任务失败。
❓EDPA的创新点和实验表现如何?
EDPA最大的特点在于通用性强,可以应用于不同的VLA模型,无需了解模型内部架构。实验在LIBERO机器人仿真基准上进行了广泛评估,结果显示,EDPA能显著提升主流VLA模型的任务失败率。例如,在OpenVLA模型上,EDPA让任务失败率平均提升了74.7%,远高于随机噪声补丁和其他现有攻击方法。
❓论文还提出了怎样的防御策略?
针对EDPA带来的威胁,作者还提出了一种视觉编码器的对抗性微调方案。具体做法是利用EDPA生成的对抗补丁对视觉编码器进行微调,促使其在干净和被攻击输入下都能输出相似的潜在表示。实验结果显示,经过对抗微调的模型在面对EDPA和其他补丁攻击时,失败率大幅下降,同时在无攻击时的性能仅有微小损失,实现了鲁棒性与性能的平衡。
arXiv: 2510.13237v1#机器人学习 #对抗攻击 #模型安全 #奥克兰 #果壳智算